問題チェックリスト [ ]
既にだれかが何かを書いた問題の番号を挙げておきます レジュメを書いた人は自分の書いた問題番号を書き足しておいてください
28/153
一章 1 2 3 4 5 7 8 9 10 12 14 15
二章 1 2 3 4 5 7 14 15 16 19
三章 4 8 15
四章 1 2
五章 1
六章
七章
八章
この問題集の輪読をします [ ] あまりに歯ごたえのある問題集なので誰かと協力しながら読みたいと考えています
問題集の構成について [ ] 目次を掲げておきます この項に関してはレジュメの形式をとらないことを断っておきます レジュメの序文のような感じです
第1章 運動学
第2章 質点の力学
第3章 非線形振動
第4章 動く座標系
第5章 質点系の力学
第6章 剛体の力学
第7章 重力の起こす運動
第8章 電磁場における運動
構成としては前章に出てきた事柄が後の章において必要となるように作られています
たとえば問題1-1で弧座標という座標系が紹介されているのですが、この座標系はのちの問題2-13にて使うというようにです。ただ初めの方で学んだ内容だけで後章の問題が解けるように設計されているとは必ずしも言えません。ほかの書籍やウェブページなどで調べないと分からないような事柄も出てきます。
WKB法なんかがその例で、僕の目から見るとこの本だけで理解できるとはとても思えません。WKB法以外にも、解析力学を用いたほうが見通しが良いのではないかという問題もあります。実際、山本義隆、中村孔一著の解析力学にて演習詳解力学の問題が取り上げられています。
問題集で説明しきれないこと、あるいは著者にとって常識だと思われるようなことは書かれていないように思います。
方針(一例として) [ ] この輪読wikiの演習詳解力学のページでは、各問題の背景や、僕が解説を読み解く上で注意したほうが良いと感じたことを簡単にまとめていきます。たとえば歴史的な背景、計算するうえで必要になる数学的な道具、ある問題と他の問題との関連、そしてできればですが別解(解析力学的に解くとどうなるかetc)などです。(@kojinncircle_en)
1-1 弧座標 [ ]
この問題で扱われているのは弧座標 という表示方法です。
この座標のとり方は本問題集で初めて見たのですが、懸垂線(カテナリー)の形を表すために用いていることもあるようです。検索すると出てきます。
解き方としては弧座標表示であらかじめ与えられた式をデカルト座標に変換し、何の図形を表しているかを確認する ことです。
(1)では三角関数の積分、(2)では微分して増減表をつくること、そして(3)では部分積分が必要になります。
他の問題との関連としては、2-13において斜面を運動する質点の運動を調べる為に用いられています。ちなみに2-13の問題は共立出版の詳解力学演習でも同じ問題があります。ただ弧座標ではなくデカルト座標を用いて解かれています。
最初の問題らしく、小手調べといった感じの問題です。
(2)の増減表を右に挙げておきます
(@kojinncircle_en)
1-2常らせん [ ] (1)らせん運動をデカルト座標で見ます x-y平面への射影が円運動、そしてz方向は(問題文においてピッチがh
として与えられているので)x-y平面の円運動が一周するごとにhずつ動きます 角速度は自分で勝手に置きます
ベクトルが直交するとき内積がゼロになることを用います
余談ですがベクトルを用いると余弦定理が簡単に出てくる ので受験の時気に入って使っていました(別にベクトルをわざわざ使わなくとも三平方の定理を用いれば自然に導出できるのですが)
(2)ベクトルの大きさを求めてそれを向心加速度に等しいと置くだけです
(3)問題に与えられている外積が入った式に先に求めた速度の式を代入して計算します ちょっと面倒なのですが2,3回やれば慣れます 得られた式からベクトルがどのように動くかを考えます 解答には首ふり運動と書いてありますが、ぼくはハンマーを投げようと回転している室伏広治さんみたいな運動かなあと考えました 入試ならバツを食らいますね
以上で問題は終わりです 初めてやった時は外積計算が面倒で仕方なかったです ベクトル解析の授業を受けた後でようやく慣れました
らせんといえば磁場中の荷電粒子の運動 が思い浮かぶと思います 山本義隆の「力学と微分方程式」 という本で扱われています
オマケ 余弦定理の導出
この本には複素数を用いて二つの方程式を一つにまとめて解く方法 が挙げら
れていますが、同じ方法が演習詳解力学でもちょいちょい出てきます たとえば剛体の運動の
章でのソリの運動を調べる問題です
中村徹の力学の本には「解答に多くのすぐれた工夫がなされている」と紹介されています 複素数を用いた工夫もその一つなのでしょうか
1-3 デカルト座標から極座標系への変換 [ ]
座標変換 の問題です この問題で身につけることは位置ベクトルと速度ベクトル(または加速度ベクトル)を描いて、三角関数を用いて変換すること です 回転行列を用いても良いのですがこの程度の問題に使うのは大げさな気がします。
極座標表示の加速度を求めることは、単純に極座標系での速度を微分することでは求まりません
デカルト座標での速度を微分し、それから極座標系に変換することが必要です ものすごく面倒でした
解析力学を学ぶと、あまりにも簡単に加速度が求まるので感動した覚えがあります
(1),(2)は図を描けばわかると思います この辺の計算は山本義隆の新物理入門にも載ってました(剛体の運動のところで)
(3)は面積速度の式 をしっていないと分からないです または角運動量の式です。それさえ知っていれば(2)でもとめた式からすぐに答えが分かります
余談になりますが、面積速度と角運動量は似て非なるもの です たぶん質量がかかっているかいないかが大きな違いです。事実、昔の受験参考書には角運動量保存則が成り立つけれども、面積速度は一定にならない問題があります
その問題集とは谷藤祐というひとが書いた「必修物理問題演習 」という本です。谷藤祐は駿台で講師をしていたこともある人で、戦時中に開設されていた特別科学学級で学んだのち、金沢大学に進み、坂間勇と共著論文を描いたりしてる人です 謎が多いです
(特別科学学級は京都と大阪にもあったそうです 京都の学級には映画監督として有名な伊丹十三、そして大阪には作家の筒井康隆がいたとウィキペディアにはあります 日刊イトイ新聞に伊丹十三さんの記事があるので興味がある人はぜひ読んでみてください)
さてものすごく難しい問題集である演習詳解力学もここまでは基礎的な事柄を問う問題でした つぎからちょっと面倒になります
5/1追記 面積速度が保存せず、角運動量が保存する例となる問題を貼っておきました 自信のある人は解いてみてください
1-4 楕円軌道の加速度 その接線方向成分と向心方向成分 そして楕円の曲率中心について [ ]
(a)まずすべきなのは楕円のパラメタ表示
角速度は適当に置けばいいのですが大抵はωとおきます
パラメタ表示ができたらそれを時間で二階微分します こうして加速度が求まり
ました
さてここで必要となるのがベクトルの内積計算
たとえば二次元のデカルト座標の原点を始点とするベクトル(仮に r とします)があって、そのx,y成分を知りたいとき、各方向の単位ベクトルとの内積をとれば求まります よく受験参考書で初速度を成分に分ける必要のある問題があったと思いますが要はアレだと私は認識しています
トルをその大きさで割ったもの(要するに単位ベクトル)との内積です
なぜなら速度ベクトルは常に軌道に接している
直交するベクトルの内積がゼロになる
つまり先に求めた接線方向の単位ベクトルに直交するベクトルを見つけて、それと加速度ベクトル
との内積をとれば終わりです この法線方向の単位ベクトルが後の問題で必要になってきます
(b)物理のかぎしっぽ
たしか既知の曲率半径の公式と同じ式になったはずです ノートを見つけたら書き足します
じて、それを楕円のパラメタと足し合わせればよいのですが、ぼくは違う方法で求めました
楕円軌道上の二点における法線を考えます 二直線の傾きの差をΔθとして交点を求め、いい感じに式
を整えてからΔθ→0の極限をとれば出てきます かっこつけた方法ではなく慣れ
親しんだ方法で解きたかったのだと思います
けれどもこの方法はとにかく計算が面倒 です 頭の悪い方法だったと反省しています でも極限を取ってきれいに式が出てきたときは感動しました あまりに面倒だったのでy成分しか出していません…計算の結果出た式はアステロイドのパラメタ表示 にほかなりません アステロイドは高校のとき問題集で微分の練習問題として出たような
(d)実は定量的には納得していません 定性的には、楕円の曲率が変化するのと同時に曲率半径の長さもそれに応じて伸び縮みしているからだというふうに理解しています
1-5 楕円軌道 角運動量 加速度 [ ]
(a) 前問でもあった楕円のパラメタ表示 です パラメタを消去すればデカルト座標での楕円を表す式が得られます
(b) 角運動量をデカルト座標で表すとどうなるかを知っているかどうかです。新物理入門に書いてあります
楕円のパラメタ表示を代入して整理すると確かに一定値になります
(c)パラメタを二回微分すれば加速度が求まります 得られるのは単振動の式です 加速度が常に原点方向を向いていることも分かると思います(マイナスが付いているので)
(d)最後の問題です (c)までがすごく簡単だったので「おや?物理に開眼できたのかな?」と一瞬思ってしまいそうになりましたがとんでもなかったです
この問題は、極座標系での角運動量の式を用いて、(b)とおんなじ結果になるかどうかを確かめることが必要になります
角度を表すのにアークタンジェントが必要になります これはすぐ表せると思います 大学一年生が使うような教科書を見れば大抵載ってます
さて、かんじんの角運動量の計算なのですが、これがすごく面倒でした わたしにもできたので時間をかければ誰でも結果を導けるとは思いますが、まあ面倒でした
中村孔一さんが、力学の醍醐味というのは例えば積分においてナイスな変数変換を探したり、要領のいい計算方法を見つけたりすることだという意味のことをおっしゃっていた記憶があります(ciniiで読めます) これを考えるとぼくは力学の醍醐味を味わえていないことになります 憂鬱です
1-7 三次元極座標の単位ベクトル [ ] だいたい解答を見ずに解けるようになったので概要だけ取り急ぎ書いておきます 途中計算は後で貼っておきます
三次元極座標の単位ベクトルを外積を使って表し、さらに単位ベクトルとの内積で速度ベクトル、加速度ベクトルを求める 問題です
極座標を用いた速度、加速度の表示は大抵の初等的な物理数学の本に書いてあると思います(手元にある共立出版の「物理と理工系の数学」には載ってました)ただ、大抵の本での計算方法は極座標をデカルト座標と絡めて計算するやり方で、単位ベクトルとの内積で求める方法は載っていません 私が見たことある物理数学の本はたかが数冊なので載せてる本もあるのかもしれないです
位置ベクトルの時間変化は伸び縮みだけとは限らず、回転も加わる可能性がある ため、単純に微分するだけでは求まらないところが面倒さの原因です この問題でのように単位ベクトルとの内積で考えるとちょっとだけ計算が楽です
計算するうえでのポイントは①ベクトル三重積 ②スカラー三重積 ③要項で説明されているベクトルとスカラーの関係式の利用 ④式の読み替え この四つぐらいです これさえ分かってれば理系の学生ならすぐできるようになります
とはいえ④についてはやった経験がないと気づかないと思います(気付かないのは自分だけかもしれないですが)
要綱で説明されていた角速度ベクトルの計算は省かれている部分が多い気がするので、途中計算をあげる際には要項の分も載せておきます
2017-5-4(kojinncircle_en)
1-8 犬と鎖に引きずられる人の運動 [ ] 面白い問題です。
・犬の運動が一直線上であること
・人の進む方向(=速度方向)が犬がいる方向であること
・人と犬の距離が一定であること
から人の軌跡が求まります。犬の速さは関係ありません。
犬がx軸上を運動するとして、人の位置を(x,y)と置いて微分方程式を立てます。
解説では変数変換をしてから積分に持ち込んでいますが、積分の形にしてから変数変換を考えるほうが馴染み深いとは思います。好みの問題だとは思いますが・・・
ちなみにこの積分、自分はノーヒントでは解けない気がします・・・(笑)
こういうのも解けるようにならないとですね・・・
結果をグラフに表すと、下図のようになりました。直感と一致していますね。
グラフ自体は単純ですが式は結構複雑で、等速直線運動をしている犬が持つ鎖に引きずられるという単純な運動からここまで複雑な式が出てくるところなんかも面白い気がします。
追記:図中の式、修正しました。
1-9 発音体(極座標の応用例) [ ] この問題は江沢洋が採用したものだと思います。なぜなら江沢氏の著作「理科が危ない」 で取り上げられているからです。出典は坂井卓三の「一般力学」 です。
さて、音を発しながらある地点に向かう物体が、自ら出した音と一緒に目的地点に到着するための条件 を考えることが求められます。
発音体の速さが音の速さよりも大きいので、一直線に目的地に向かうことはできません 。なので(どういう形なのかは分からないとして)カーブしながら目的地に向かう のだということが分かります。右回りか左回りかは本質的な問題ではないので、ここでは左回りにカーブしながら出発するのだと考えます。
坂井卓三の力学の教科書からの画像を貼っておきます。図を見るとイメージしやすいです。
二枚目の図のように、微小時間では弧PQは線分とみてよい です。図では直線と書いてしまいましたが…
図2の最後の式の両辺をアールドットで割ると、変数分離 形の式が出てくるのでそれを積分すれば発音体の軌道が出てきます。その軌道は対数渦巻 と呼ばれるものです。
図に書き忘れたのですが。発音体が最初に基準線を横切る際のrの値を適当においておけば積分定数が求められます。
1-10 追跡問題 [ ] 正方形の部屋の各隅に1匹ずついる亀が、互いに真隣の亀を目指して同じ速さで歩き始めるとどのような軌跡を描くか、という問題です。
図形的な考察がポイントで、解答にもあるように速度の方向と位置ベクトルのなす角が
π
4
{\displaystyle \frac{\pi}{4}}
−
r
˙
:
r
θ
˙
=
1
:
1
{\displaystyle -\dot{r}:r\dot{\theta} = 1:1}
d
r
d
θ
=
−
r
{\displaystyle
\frac{dr}{d \theta}=- r
}
と微分方程式が導かれます。
これを解いて
r
=
2
2
a
e
−
θ
{\displaystyle r=\frac{\sqrt{2}}{2}ae^{-\theta}}
この軌跡は以下のようになります。
(gifです。クリックして再生させてみてください)
(b)ではこの軌跡の長さを求めます。普通に積分すれば求まって、正方形の1辺の長さと等しくなります。
この事実の初等的な説明ってあるんでしょうか。感覚的にはわかる気もしますがうまく説明できる気はしません。どなたかわかる方がいらっしゃれば加筆していただけると幸いです。
(Kohei Ichikawa @hybrid_rainb0w)
重複する部分がありますが,加筆いたします.
4つの質点が等しい距離
a
{\displaystyle a}
v
{\displaystyle v}
有限の道のりを一定の速さで動くわけだから,当然有限の時間
T
{\displaystyle T}
質点の速度ベクトル
v
→
{\displaystyle \vec{v}}
r
→
{\displaystyle \vec{r}}
v
r
=
d
r
d
t
=
−
v
2
{\displaystyle
v_r=\frac {dr}{dt}=-\frac{v}{\sqrt{2}}
}
円周方向に
v
θ
=
r
d
θ
d
t
=
v
2
{\displaystyle
v_\theta =r\frac{d\theta}{dt}=\frac{v}{\sqrt{2}}
}
である. 動径方向の微分方程式の解は
r
(
t
)
=
r
0
−
v
2
t
{\displaystyle
r(t)=r_0 -\frac{v}{\sqrt{2}}t
}
ここで,
r
0
{\displaystyle r_{0}}
a
/
2
{\displaystyle a/\sqrt{2}}
r
(
t
)
=
a
2
−
v
2
t
{\displaystyle
r(t)=\frac{a}{\sqrt{2}} -\frac{v}{\sqrt{2}}t
}
で変化する.したがって,
r
=
0
{\displaystyle r = 0}
T
{\displaystyle T}
T
=
a
v
{\displaystyle
T=\frac{a}{v}
}
である.
また,時間が
Δ
t
{\displaystyle \Delta t}
Δ
r
=
−
v
2
Δ
t
{\displaystyle
\Delta r =-\frac{v}{\sqrt{2}}\Delta t
}
変化し,位相は
Δ
θ
=
1
r
v
2
Δ
t
{\displaystyle
\Delta \theta=\frac {1}{ r} \frac{v}{\sqrt{2}}\Delta t
}
すすむが,この2つの式を合わせると
Δ
t
{\displaystyle \Delta t}
Δ
r
Δ
θ
=
−
r
{\displaystyle
\frac{\Delta r}{\Delta \theta}=-r
}
つまり
d
r
d
θ
=
−
r
{\displaystyle
\frac{dr}{d \theta}=- r
}
という微分方程式ができる.これはすぐに解けて
r
(
θ
)
=
r
0
e
−
θ
{\displaystyle
r(\theta)=r_0 e^{-\theta}
}
ここで
r
0
{\displaystyle r_{0}}
a
/
2
{\displaystyle a/\sqrt{2}}
r
(
θ
)
=
a
2
e
−
θ
{\displaystyle
r(\theta)=\frac{a}{\sqrt{2}} e^{-\theta}
}
これが,質点の軌道を表す式で「対数らせん」と言われている. また,速さ
v
{\displaystyle v}
T
=
a
/
v
{\displaystyle T=a /v}
l
=
v
×
a
v
=
a
{\displaystyle
l=v\times \frac{a}{v}=a
}
で,初めの質点間の距離と等しい.
(coJJyMAN)
1-12 一様速度の流れを進む舟 [ ]
昔の東京医科歯科大学の物理の過去問で川を渡る問題がありました。新体系物理でも何問か出てきます。これらの問題では舟の速度が何に対する速度なのか を意識することが重要でした(つまり岸に対する速度なのか川に対する速度なのか)
本問題では舟の速度は川の水に対する速度です(…と私は考えています)
ただ受験用の問題と違って難しい点は舟の軌道の式を求めるところ です。苑田先生のいう完全情報 が求められるのがきついです。
(a)座標を立てて速度の式を書く だけです ただ座標を立てるときの工夫として、対岸のB点を原点にとる ことが注意点と言えるでしょうか B点を原点にとると角度の定義がしやすい からです 計算するうえでタンジェントの式が必要になるので必然と言えると思います。
舟の速度にコサインがかかっているので、船が流れに逆らって(つまり速度がーx方向を向いて)対岸にたどり着くには流れの速さよりも大きい速さで舟を進める必要があります x方向の速度の式からその条件はv>V であることが分かります。
(b)ここで必要となるのは①三角関数の微分②積の微分法③結果が対数となる積分 です これらは高校で習う分で間に合いますが、もう一つ必要なのが次の
④三角関数の有理式の積分は適切な置き換えをすることにより単なる有理式の積分になる
ということです。一応受験参考書の一対一対応の数学(数学Ⅲ)に載ってましたが、大学一年の授業で習うことが多いのではないかと思います。
積分を行うと出てくる定数は初期条件から求められるのですが、演習詳解の解答ではしれっと初期条件から定数を決定するプロセスを省いています 。求め方もあとで貼っておきます。(フォロワーの方に教えていただきました。ありがとうございます!)
舟の軌道の式が出たら、あとは軌道を図示するための情報として、船が最も下流に来る位置 を求めます。これは舟の軌道がy軸に対して傾きゼロになる点です。要するにxをyについて微分してゼロと置いた式を整理 すれば条件が出てきます。(これもフォロワーの方に教えてもらいました)
軌道を図示するための条件を出したところで手で図を描くのは難しい気がします。適当なソフトを用いて描くのがよさそうです。ただ、舟の速さが流れよりもものすごく大きいときはA→Bへと一直線に進む ことは直感的にわかりそうです。舟の速さが流れよりもわずかに大きいときは、対岸まで流れに負けつつ進み、対岸にたどり着いたのちに岸に沿ってB点にたどり着く のもなんとなくわかります。
(c)まだまとめ切れていないので出来次第書き足します。
1-14 無限小回転のベクトル表現 [ ] 様々な参考書で見かける物理数学の問題です。無限小回転がベクトルで表されることを, 複数回の無限小回転の合成が1回の無限小回転と同様の表式で表現されることから示します(くどい)。
数式中で太字に出来なかったので, あーこれはベクトルだな, と脳内補完してください, お願いします。
はじめに無限小回転による位置ベクトルの移動を補足説明します。
大きさ1の単位ベクトルnと位置ベクトルrのなす角を φ(rad)とおくと, 直角三角形を描き三角比から回転軸中心の円の半径は rsinφ になります。これは外積n×rの大きさと等しくなっています。
円弧の大きさは回転角(rad)と半径の積で与えられたため, その大きさは δθn×r となります。このベクトルの向きは単位ベクトルの向きの取り方から回転の向きと等しくなっています。したがって, 位置ベクトルの変遷が分かります。有限の回転角については, 物理のかぎしっぽのベクトル代数1「ベクトルの回転」のページ(http://hooktail.sub.jp/vectoranalysis/vectorRot/ ) が役に立つでしょう。有限の回転はロドリグの公式と呼ばれまとまった形になっています。
次に, 無限小の回転角の2次の項を無視する部分について補足説明します。
δ
θ
2
n
2
×
(
δ
θ
1
n
1
×
r
)
{\displaystyle \delta \theta_2 n_2 \times (\delta \theta_1 n_1 \times r)}
(
δ
θ
2
n
2
⋅
r
)
δ
θ
1
n
1
−
(
δ
θ
1
n
1
⋅
δ
θ
2
n
2
)
r
{\displaystyle (\delta \theta_2 n_2 \cdot r) \delta \theta_1 n_1 - (\delta \theta_1 n_1 \cdot \delta \theta_2 n_2)r}
と変形され, 2項ともに無限小の回転角の積が現れます。ベクトル解析の公式として与えましたが, 成分ごとの計算を行ってもそれほど負担の大きい計算ではないと思います。レビチビタの記号を用いるとすっきりと示すことができるでしょうか(ちょっと力不足です)。
かくして複数回の無限小回転の合成が1回の無限小回転と同様の表式で表現されました。「回転軸がてんでバラバラな場合でも,無限小回転ならばこの表現でもいい」というのはやや直感に反していると感じましたが, なかなか面白い帰結だと思います。この問題のレジュメ作る意味あったかなあ、ふええ。 (清涼 @tn_cider)
1-15 3次元の回転の合成の法則を球面三角法で考える [ ] 2つの回転の合成が必ず一つの回転で表されるはずだということが直観的にわかれば,これを球面上の点の移動と考えたときに,回転を合成した後に必ず位置を変えていない場所が球面上に2箇所見つかる.これが合成された回転の軸となる2点である.
ここで,視点を変えて,合成回転軸の球面上の点Tを話の主人公にする.Tは地球儀のTokyoということにしてみよう.Tにあった飛行機が,アメリが西海岸の地点Uまで行って,帰って来たとする.
このとき,TとUのちょうど中間の地点をCとすると, Cをとおり,大円TUに直角に交わる大円ACBを球面上に描けば,大円AC上の点Rから行きの飛行機を観測すると移動角度ω_1が得られ,大円CB上の点Sから行きの飛行機を観測すると移動角度ω_2が得られる,これらの角度はCからの距離によるが,まずはここまでのところを自分で図に書くと良いだろう.
すると,設問の状況で大円RTの延長上の点Vが回転
R
(
ω
1
)
{\displaystyle R(\omega_1)}
S
(
ω
2
)
{\displaystyle S(\omega_2)}
点Rや点Sは,地球の反対側の点R'やS'ではωの正負が逆になるので図に書くときは「Cに近い方の点」で考えるのがよい.
1回の軸の回転で作られる球面三角形は,直角2等辺三角形になることを思い出せば,次の図が描ける.
Fig1.15.1
R
(
ω
1
)
{\displaystyle R(\omega_1)}
②は
S
(
ω
2
)
{\displaystyle S(\omega_2)}
③は①と②のUとTを一致させて重ねた図に補助線を引いたもの
ここで,RSとUTの交点をCとすれば,前述の飛行機が実際には①と②の経路を通っていても,UとTを結ぶ経路ならRやSからみれば角度は同じなので,UTを結ぶ最短経路を飛んだと想像したのが,前述の例え話である.
最後に,回転を連続なものではなく,点から点へのジャンプとして,重要な補助線を残した図が④となる.
この図の∠STV=∠SUW=∠STV'=(1/2)ωにより,題意は証明できる.
Fig.1.15.2
[別解]1辺と2角が与えられれば三角形が唯一に定まるのは,平面幾何学でも球面幾何学でも等しく成り立つことは大前提とする.以下,平面幾何学でも球面幾何学でも共通に成り立つことだけを使って考察するので,注意してほしい
①球面上に任意の三角形RSTが与えられた時,RTの延長上で∠RST=∠VSTとなる点Vを置き,三角形RSVを描く.
②RVを軸としてSと線対称な位置にUをおくと,RSVと鏡像になる三角形RUVができる.
③この三角形RUVをRを中心に回してUをSに重ねる.すると,この三角形RSV'にはTが移動したT'がある.
④つぎにS=U'を中心にT'をTに重ねる.するとV'はV’’に,RはR'に移動する.2つの三角形はもともと鏡像であったので,線SR'はSVと重なり,SV’’はSRと重なる.この図に①の角度ABCを書き込んでまとめると,②の回転の角度は2A=ω_1,③の回転の角度は2B=ω_2,その結果④よりTから見たVとV’’の角度は2C=ωとなる.したがって,①の図の
A
=
(
1
/
2
)
ω
1
,
B
=
(
1
/
2
)
ω
2
,
C
=
(
1
/
2
)
ω
{\displaystyle A=(1/2)\omega_1,B=(1/2)\omega_2,C=(1/2)\omega}
(@coJJyMAN)
2-1 螺旋上の質点の運動 [ ] 3次元での運動です。軌跡は初めから与えられているので、運動のz成分が分かればすべて分かります。
正直言うと、エネルギー保存を使ってそこからzの微分方程式を導くこの解法はまったく思い浮かびませんでした。
言われてみると確かに、って感じです。グラフの形から抗力を計算して運動方程式を立てて・・・ってやるとたぶん死にます。解けるのかすら怪しいです。
エネルギー保存の式を整理すると簡単な一階微分方程式になります。初期値は勝手に決めていいのでt=0のときz=0としていいでしょう。
運動がわかってから抗力を求めるとうまくいくんですね。x,y,zを二階微分すれば加速度が出るので、そこから運動方程式を立てると抗力が出てきます。この系に登場する力は重力と抗力だけですからね。
螺旋の接線ベクトルですが,(dx/dt,dy/dt,dz/dt)で出てきますがx,yの中にzが陽に含まれているので(dx/dz,dy/dz,1)としても求まります。こっちのほうが楽ですね。
最後に、螺旋の接線ベクトルと抗力の内積を計算して0になることを確かめます。
めちゃくちゃ大変ですね・・・
おまけとして、この螺旋の概形です。
a=2.0, h=1.0
2-2 非自励系の二階線形常微分方程式、Green関数 [ ] 比較的解きやすい問題だと思います。(a)では非自励系の二階線形常微分方程式を定数変化法によって求めます。この方法は結構有名な手法で、問題では言われたとおりに計算していけば求めるものが出てきます。
ちなみに条件式(ⅲ)ですが、これは問題を解きやすくするために恣意的に置いたものになります。問題文にあるとおり、方程式一つに対して未知関数を2つおいているので、拘束条件のようなものを設定することができます。これは任意に設定することができますが、「このように設定すればあとの計算がすっきりする」ということで天下り的に導入されています。
実際計算を進めていくと、項同士消されたりして綺麗な形になります。
なお、初めの(ⅰ)の方程式が速度に比例する減衰項が含まれるものである場合も同じように(ⅲ)の拘束条件を設定することで解くことができます。ただこの場合はもう少し複雑になり、ロンスキアンと呼ばれる量が登場したりしてきますが。
(b)ではGreen関数が出てきます。Green関数は電磁気のラプラス方程式やポアソン方程式で出てくるほうが馴染みがあると思います。そこでよく出てくる形とは違う形をしていますが、(ⅷ)も立派な(?)Green関数です。
(ⅹ)を満たすことを示すには、デルタ関数の定義に則って両辺を積分します。解答では t ≠ t' の時に左辺が0になることを計算していますが、初めから無限区間で積分して左辺が1になることを示せば十分なのではないかと思っています。
最後に、f(t')をかけてt'で積分すると右辺はデルタ関数の定義よりf(t)、左辺は(ⅸ)の式と見比べると無事mx''+mωxが出てきて(ⅰ)が成立することを確認できます。めでたしめでたし。
2-3 「調和振動子+支点の指数関数的移動」による運動 [ ] t=-∞で単振動しているバネの支点をゆっくり動かすとどういう運動をするかという問題です。実は問題文に納得がいってなくて、初期条件で支点がx=lにあるなら、そのときの質点の運動はx=Acosωt+lになるはずじゃないかと思うのです。。。それかl=0として問題を進めていくか。
ただ僕の勘違いかもしれないので、そこのところわかる方いたら教えてほしいです。
(a)振動の模様を答える問題。まず質点に働く力はバネ定数と質点と支点の変位であることに注意して運動方程式を立てます。
するとこの運動方程式は調和振動子の強制振動の式とみなせるため、2-2の結果が使えてxの運動が解析的に求まります。解答ではこの積分はsinを複素数表示して解いていますがもちろん部分積分2回でも解けます。ここは好みの問題でしょうか。
振動の中心は支点よりも小さくなります。運動の様子をイメージするのが難しいです、、、
(b)α, tともに十分小さく、指数関数部分をaとみなせるような範囲を考えると、xの運動がaを中心とする単振動になるといえます。ただ指数関数部の影響が出てくる t >> 1までは質点の運動は単振動が支配的なので、当たり前の結果といえなくもなさそうです。
ちなみに、αもωも定数なんだからα→0を仮定しないで普通に指数関数のところが1になる、というような議論のほうが自然な気がするのですがどうでしょうか。
(c) 仕事を求めます。質点に働く力が時間の関数として陽に書けるので、時間に変数変換して積分します。またこの系についてエネルギー保存が成り立っていることも確かめられます。
ここで求めた仕事が正か負(つまりt=-∞とt=0でエネルギーは増えるか減るか)は a/2 と A の大小関係に依存します。Aの方が大きい場合、支点を動かすのは系に対してブレーキをかけるような感覚になるわけですね。
2-4抵抗を受ける場合のバネの振動と強制振動 [ ] 力学の典型問題を複素関数を駆使して解きます。
(a)強制力がない場合 [ ] まず運動方程式を書き下します。式(1)のカッコの中のxは必要ありません。誤植と考えられます。このカッコ全体は演算子です。これをLと便宜上おいておきます。
(1)の微分方程式の代わりに、複素数z(t)に演算子Lを作用させて得られる微分方程式を解くことにします。得られたz(t)に関する微分方程式ですが、演算子Lに虚数iが含まれないので L Re z(t)=0、L Im z(t)=0がそれぞれ独立に成立します。しかもRe z(t)、Im z(t)は実数関数です。よってRe z(t)、Im z(t)およびそれらの線形結合は式(1)の解になります。
z(t)にLを作用させて得られた二次方程式(特性方程式というやつです)を解くと、解は三種類あることが分かります。それぞれ減衰振動、臨界減衰、過減衰に分類されます。
減衰振動、過減衰は容易に理解できるでしょう。
問題は臨界振動です。二次方程式の解が重解になる場合に相当し、微分方程式の解が一つしか得られません。そこでもう一つの解を得るために二つの方法が提示されています。
最初の方法はω=β+δ(δは小さい)とおくというものですが、正直なところその意図が理解できませんでした。この手の問題の定石として先に得られた二つの解を極限的に一致させ、その過程で2つ目の解を見つけるという方法があります。示されているのはこの方法のことだと思うのですが、その場合ωはω_0でないといけません。誤植を疑って旧版を参照しましたが、この問題は載っていませんでした。
自分の勘違いかもしれませんので分かる方は修正をお願いします。
第二の方法はいわゆる定数変化法を使うものです。これは特に問題はないでしょう。
(b)強制力がある場合 [ ] 運動方程式の特解を求めましょう。(a)でもやったように微分方程式のx(t)を複素関数z(t)に置き換えてz(t)を求め、後でその実数部分をとるという方針でいきます。
まずz(t)の形として指数関数の肩に強制振動の角振動数を含むものを仮定します。外から無理やりこの角振動数で振動させるのですから、質点もこの角振動数で振動するでしょう。もしうまくいかなかったらそれまでのことです。解の形をまた予想して代入するのみです。
書いてある通りに計算すると特解が得られます。一般解は(a)の解にこの特解を足し合わせたものになります。
βが0でない限り斉次方程式の一般解はt→∞で0に収束しますから、最終的には一般解に相当する運動は消え、強制力による運動のみが残ります。
普通は抵抗によって質点の振動が外場の振動に追いつかず、位相にズレが生じると考えられます。そのズレはφで表されます。図2.10で示されているように、位相のズレは抵抗の大きさを表すβに依存し、また外場の角振動数が固有角振動数より大きい場合も位相差が大きくなることが読み取れます。
もう少し明快な説明もあるようなので誰か加筆をお願いします。
2-5 2階微分方程式のGreen関数とWronskian [ ] (`@coJJyMAN)
ポアソン方程式などでGreen関数を求めるのにはフーリエ変換を使ったりしたが,ロンスキーアンというものは名前と定義しか知らず,使ったことがなかった.テキストでは解法の手順が天下り式に与えられており,たしかに解法の練習にはなるが,「何故こんな定義の式を使うのか」気になる人(僕のこと)には,「何でこんなことやらされているのか意味がわからい」ので,正直気持ちが悪い.そこで,あくまで順番はテキストに則って進めるが,テキストの模範解答とは異なる道筋を辿り,自分にとって(計算ではなく)内容が理解できるものとした.模範解答が直線的すぎて意味が取りづらい方にとっても,少しでも参考になればいいかな?
2-5(a) [ ]
β
,
γ
{\displaystyle \beta,\gamma}
f
(
t
)
{\displaystyle f(t) }
L
x
(
t
)
=
f
(
t
)
,
L
=
D
2
+
2
β
D
+
γ
,
D
=
d
d
t
.
.
.
(
1
)
{\displaystyle
\begin{align}
L x(t) =f(t) ,\quad L=D^2+2\beta D+\gamma,\quad D=\frac{d}{dt}
\quad ...(1)
\end{align}
}
の特殊解を問題2-2の(ix)の形に書くGreen関数を求めたい.
ここで「問題2-2の(ix)の形」とは
x
o
(
t
)
=
1
m
∫
t
0
∞
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
.
.
.
(
i
x
)
{\displaystyle
\begin{align}
x_o (t)=\frac 1 m \int_{t_0}^{\infty}G(t,t')f(t')dt'
\quad ...(ix)
\end{align}
}
で,
G
(
t
,
t
′
)
=
{
H
(
t
,
t
′
)
t
≥
t
′
0
t
<
t
′
{\displaystyle
G(t,t')=\begin{cases} H(t,t') & t \ge t' \\ 0 & t < t' \end{cases}
}
となるものである.
問題2-2では
G
{\displaystyle G}
(
D
2
+
ω
2
)
G
(
t
,
t
′
)
=
δ
(
t
−
t
′
)
{\displaystyle
(D^2+\omega^2)G(t,t')=\delta(t-t')
}
であった.それでもし
(
D
2
+
ω
2
)
y
(
t
)
=
f
(
t
)
{\displaystyle
(D^2+\omega^2)y(t)=f(t)
}
という方程式があったら,この
y
{\displaystyle y}
y
(
t
)
=
∫
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
{\displaystyle
y(t)=\int G(t,t')f(t')dt'
}
という積分で求められる.
(
D
2
+
ω
2
)
y
=
0
{\displaystyle (D^2+\omega^2)y=0}
さて,
L
x
=
f
{\displaystyle L x=f}
(
D
2
+
2
β
D
+
γ
)
x
=
f
.
.
.
(
2
)
{\displaystyle
(D^2+2\beta D +\gamma)x=f
\quad ...(2)
}
D
g
(
t
)
=
b
g
(
t
)
{\displaystyle
Dg(t)=bg(t)
}
となる
g
{\displaystyle g}
β
{\displaystyle \beta}
x
=
g
y
,
f
=
g
f
~
.
.
.
(
3
)
{\displaystyle
x=gy,\quad f=g\tilde{f}
\quad ...(3)
}
とする.
D
x
=
(
D
g
)
y
+
g
(
D
y
)
=
g
(
b
y
+
D
y
)
,
D
2
x
=
(
D
2
g
)
y
+
2
(
D
g
)
(
D
y
)
+
g
(
D
2
y
)
=
g
(
b
2
y
+
2
b
D
y
+
D
2
y
)
{\displaystyle
\begin{align}
Dx&=(Dg)y+g(Dy)=g(by+Dy), \\
D^2x&=(D^2g)y+2(Dg)(Dy)+g(D^2y) \\
&=g(b^2y+2bDy+D^2y)
\end{align}
}
なので,(2) 式は
g
[
(
b
2
y
+
2
b
D
y
+
D
2
y
)
+
2
β
(
b
y
+
D
y
)
+
γ
]
y
=
g
f
~
{\displaystyle
g[(b^2y+2bDy+D^2y)+2\beta(by+Dy)+\gamma]y=g\tilde{f}
}
つまり
[
(
b
2
y
+
2
b
D
y
+
D
2
y
)
+
2
β
(
b
y
+
D
y
)
+
γ
]
y
=
f
~
.
.
.
(
4
)
{\displaystyle
[(b^2y+2bDy+D^2y)+2\beta(by+Dy)+\gamma] y = \tilde{f}
\quad ...(4)
}
となる.この式の
D
y
{\displaystyle Dy}
b
=
−
β
{\displaystyle b=-\beta}
D
g
(
t
)
=
−
β
g
(
t
)
{\displaystyle Dg(t)=-\beta g(t)}
g
(
t
)
=
e
−
β
t
.
.
.
(
5
)
{\displaystyle
g(t)=e^{-\beta t}
\quad ...(5)
}
であり,これより(3) 式は
y
(
t
)
=
e
β
t
x
(
t
)
,
f
~
(
t
)
=
e
β
t
f
(
t
)
.
.
.
(
6
)
{\displaystyle
y(t)=e^{\beta t} x(t) ,\quad \tilde{f}(t)=e^{\beta t}f(t)
\quad ...(6)
}
という関係で具体的にあらわされることがわかり,また,(4) 式は
(
D
2
+
γ
−
β
2
)
y
(
t
)
=
f
~
(
t
)
.
.
.
(
7
)
{\displaystyle
(D^2+\gamma -\beta^2)y(t)=\tilde{f}(t)
\quad ...(7)
}
という方程式となる.これで問題2-2の形になった.
2-5(b) [ ] 次に(7)式を解いていくことを考えるのだが,先に定数を書き直して
(
D
2
−
λ
2
)
y
(
t
)
=
f
~
(
t
)
,
λ
=
β
2
−
γ
.
.
.
(
8
)
{\displaystyle
\begin{align}
(D^2-\lambda^2)y(t)=\tilde{f}(t),\quad \lambda=\sqrt{\beta^2-\gamma}
\quad ...(8)
\end{align}
}
としておく.さて,手がかりをつかむためにまずは右辺をゼロとした方程式(斉次方程式)
(
D
2
−
λ
2
)
y
(
t
)
=
0
.
.
.
(
9
)
{\displaystyle
\begin{align}
(D^2-\lambda^2)y(t)=0
\quad ...(9)
\end{align}
}
を解く.(ちなみにこれは
f
(
t
)
=
0
{\displaystyle f(t) = 0}
f
(
t
)
=
0
{\displaystyle f(t) = 0}
f
~
(
t
)
=
e
β
t
f
(
t
)
=
0
{\displaystyle \tilde{f}(t)=e^{\beta t}f(t)=0}
2次方程式なので,線形独立な解は2つある.それを
y
1
(
t
)
,
y
2
(
2
)
{\displaystyle y_1 (t),y_2 (2)}
さて,線形独立であるということは,
C
1
y
1
(
t
)
+
C
2
y
2
(
t
)
=
0
.
.
.
(
10
)
{\displaystyle
\begin{align}
C_1 y_1(t)+C_2 y_2(t)=0
\quad ...(10)
\end{align}
}
という方程式が常に成り立つには
C
1
=
C
2
=
0
{\displaystyle C_1 = C_2 = 0}
C
1
D
y
1
(
t
)
+
C
2
D
y
2
(
t
)
=
0
.
.
.
(
11
)
{\displaystyle
\begin{align}
C_1 Dy_1(t)+C_2 Dy_2(t)=0
\quad ...(11)
\end{align}
}
も同時に成り立っている.この2つの式をまとめると
(
y
1
y
2
D
y
1
D
y
2
)
(
C
1
C
2
)
=
(
0
0
)
.
.
.
(
12
)
{\displaystyle
\begin{align}
\begin{pmatrix} y_{ 1 } & y_{ 2 } \\ Dy_{ 1 } & Dy_{ 2 } \end{pmatrix}\begin{pmatrix} C_1 \\ C_2 \end{pmatrix}=\begin{pmatrix} 0 \\ 0 \end{pmatrix}
\quad ...(12)
\end{align}
}
つまり
(
C
1
C
2
)
=
(
y
1
y
2
D
y
1
D
y
2
)
−
1
(
0
0
)
.
.
.
(
13
)
{\displaystyle
\begin{align}
\begin{pmatrix} C_1 \\ C_2 \end{pmatrix}=\begin{pmatrix} y_{ 1 } & y_{ 2 } \\ Dy_{ 1 } & Dy_{ 2 } \end{pmatrix}^{-1}\begin{pmatrix} 0 \\ 0 \end{pmatrix}
\quad ...(13)
\end{align}
}
であるが,この式が成り立つためには式の中にある行列の行列式が,ゼロになることが無いようになっていなければならない.この行列式
W
(
y
1
,
y
2
)
=
|
y
1
(
t
)
y
2
(
t
)
D
y
1
(
t
)
D
y
2
(
t
)
|
.
.
.
(
14
)
{\displaystyle
\begin{align}
W(y_1,y_2)=\begin{vmatrix} y_1(t) & y_2(t) \\ Dy_1(t)& Dy_2(t) \end{vmatrix}
\quad ...(14)
\end{align}
}
この行列式を時間変化を見るのに微分してみると,先の(9)式を思い出せば
D
2
y
=
λ
2
y
{\displaystyle D^2y=\lambda^2 y}
D
W
=
D
(
y
1
D
y
2
−
y
2
D
y
1
)
=
(
D
y
1
)
(
D
y
2
)
+
y
1
D
2
y
2
−
(
D
y
2
)
(
D
y
1
)
−
y
2
D
2
y
1
=
y
1
λ
2
y
2
−
y
2
λ
2
y
1
=
0
{\displaystyle
\begin{align}
DW&=D(y_1Dy_2-y_2Dy_1)\\
&=(Dy_1)(Dy_2)+y_1D^2y_2-(Dy_2)(Dy_1)-y_2D^2y_1\\
&=y_1\lambda^2y_2-y_2\lambda^2y_1=0
\end{align}
}
ということは,
W
(
y
1
,
y
2
)
{\displaystyle W(y_1,y_2)}
2-5(c) [ ] それではいよいよ,
L
0
y
=
f
~
,
L
0
=
(
D
2
−
λ
2
)
{\displaystyle
L_0 y=\tilde{f},\quad L_0=(D^2-\lambda^2)
}
の方程式の解をGreen関数の形で求めていこう.手がかりは前回求めた
W
(
y
1
,
y
2
)
{\displaystyle W(y_1,y_2)}
L
0
y
0
(
t
)
=
f
~
{\displaystyle
L_0 y_0(t)=\tilde{f}
}
すると,一般解についても,もちろん
L
0
y
(
t
)
=
f
~
{\displaystyle
L_0 y(t)=\tilde{f}
}
なのだから,この二つを引き算して
L
0
[
y
(
t
)
−
y
0
(
t
)
]
=
0
.
.
.
(
15
)
{\displaystyle \begin{align}
L_0[y(t)-y_0(t)]=0
...(15)\end{align}}
この式はつまり,
y
(
t
)
−
y
0
(
t
)
{\displaystyle y(t)-y_0(t)}
L
0
y
=
0
{\displaystyle L_0 y=0}
y
1
{\displaystyle y_1}
y
2
{\displaystyle y_2}
y
(
t
)
−
y
0
(
t
)
=
c
1
y
1
(
t
)
+
c
2
y
2
(
t
)
{\displaystyle
y(t)-y_0(t)=c_1 y_1(t)+c_2 y_2(t)
}
すなわち,一般解はかならず
y
(
t
)
=
y
0
(
t
)
+
c
1
y
1
(
t
)
+
c
2
y
2
(
t
)
.
.
.
(
16
)
{\displaystyle \begin{align}
y(t)=y_0(t)+c_1 y_1(t)+c_2 y_2(t)
...(16)\end{align}}
というかたちになっていることが分かる.
さて,特殊解
y
0
{\displaystyle y_0}
y
1
{\displaystyle y_1}
y
2
{\displaystyle y_2}
y
0
(
t
)
=
A
y
1
(
t
)
+
B
y
2
(
t
)
{\displaystyle
y_0(t)=Ay_1(t)+By_2(t)
}
であらわすことができそうな気がする.しかしもちろん
A
{\displaystyle A}
B
{\displaystyle B}
y
0
(
t
)
=
A
(
t
)
y
1
(
t
)
+
B
(
t
)
y
2
(
t
)
.
.
.
(
17
)
{\displaystyle \begin{align}
y_0(t)=A(t) y_1(t)+B(t) y_2(t)
...(17)\end{align}}
ただし
A
(
t
)
{\displaystyle A(t)}
B
(
t
)
{\displaystyle B(t)}
y
0
=
A
y
1
+
B
y
2
{\displaystyle y_0=Ay_1+By_2}
D
y
0
=
(
D
A
)
y
1
+
A
D
y
1
+
(
D
B
)
y
2
+
B
D
y
2
{\displaystyle
Dy_0=(DA)y_1+ADy_1+(DB)y_2+BDy_2
}
ここで,
A
{\displaystyle A}
B
{\displaystyle B}
(
D
A
)
y
1
+
(
D
B
)
y
2
=
0
.
.
.
(
18
)
{\displaystyle \begin{align}
(DA)y_1+(DB)y_2=0
...(18)\end{align}}
という式が成り立つものとすると
D
y
0
=
A
D
y
1
+
B
D
y
2
{\displaystyle
Dy_0=ADy_1+BDy_2
}
もう一回微分して
D
2
y
0
=
(
D
A
)
(
D
y
1
)
+
A
(
D
2
y
1
)
+
(
D
B
)
(
D
y
2
)
+
B
(
D
2
y
2
)
.
.
.
(
19
)
{\displaystyle \begin{align}
D^2y_0=(DA)(Dy_1)+A(D^2y_1)+(DB)(Dy_2)+B(D^2y_2)
...(19)\end{align}}
L
0
y
0
=
f
~
{\displaystyle L_0 y_0=\tilde{f}}
D
2
y
0
=
λ
2
y
0
+
f
~
=
λ
2
A
y
1
+
λ
2
B
y
2
+
f
~
.
.
.
(
20
)
{\displaystyle \begin{align}
D^2y_0=\lambda^2 y_0+\tilde{f}=\lambda^2 Ay_1+\lambda^2 By_2+\tilde{f}
...(20)\end{align}}
ということは
(
D
A
)
(
D
y
1
)
+
A
(
D
2
−
λ
2
)
y
1
+
(
D
B
)
(
D
y
2
)
+
B
(
D
2
−
λ
2
)
y
2
=
f
~
{\displaystyle
(DA)(Dy_1)+A(D^2-\lambda^2)y_1+(DB)(Dy_2)+B(D^2-\lambda^2)y_2=\tilde{f}
}
L
0
y
1
=
0
,
L
0
y
2
=
0
{\displaystyle L_0 y_1=0,L_0y_2=0}
(
D
A
)
(
D
y
1
)
+
(
D
B
)
(
D
y
2
)
=
f
~
.
.
.
(
21
)
{\displaystyle \begin{align}
(DA)(Dy_1)+(DB)(Dy_2)=\tilde{f}
...(21)\end{align}}
今までに出てきた条件は,(18)と(21)の二つの式にまとめられる
(
D
A
)
y
1
+
(
D
B
)
y
2
=
0
(
D
A
)
(
D
y
1
)
+
(
D
B
)
(
D
y
2
)
=
f
~
{\displaystyle \begin{align}
(DA)y_1+(DB)y_2=0\\
(DA)(Dy_1)+(DB)(Dy_2)=\tilde{f}
\end{align}}
これを行列を使って書くと
(
y
1
y
2
D
y
1
D
y
2
)
(
D
A
D
B
)
=
(
0
f
~
)
.
.
.
(
22
)
{\displaystyle \begin{align}
\begin{pmatrix} y_{ 1 } & y_{ 2 } \\ Dy_{ 1 } & Dy_{ 2 } \end{pmatrix}\begin{pmatrix} DA \\ DB \end{pmatrix}=\begin{pmatrix} 0 \\ \tilde { f } \end{pmatrix}
...(22)\end{align}}
したがって
(
D
A
D
B
)
=
(
y
1
y
2
D
y
1
D
y
2
)
−
1
(
0
f
~
)
{\displaystyle \begin{align}
\begin{pmatrix} DA \\ DB \end{pmatrix}=\begin{pmatrix} y_{ 1 } & y_{ 2 } \\ Dy_{ 1 } & Dy_{ 2 } \end{pmatrix}^{-1}\begin{pmatrix} 0 \\ \tilde { f } \end{pmatrix}
\end{align}}
これは
W
(
y
1
,
y
2
)
{\displaystyle W(y_1,y_2)}
(
D
A
D
B
)
=
1
W
(
y
1
,
y
2
)
(
D
y
2
−
y
2
−
D
y
1
y
1
)
(
0
f
~
)
.
.
.
(
23
)
{\displaystyle \begin{align}
\begin{pmatrix} DA \\ DB \end{pmatrix}=\frac{1}{W(y_1,y_2)}\begin{pmatrix} Dy_{ 2 } & -y_{ 2 } \\ -Dy_{ 1 } & y_{ 1 } \end{pmatrix}\begin{pmatrix} 0 \\ \tilde { f } \end{pmatrix}
...(23)\end{align}}
と書けて,
D
A
=
−
y
2
f
~
W
(
y
1
,
y
2
)
,
D
B
=
y
1
f
~
W
(
y
1
,
y
2
)
{\displaystyle
DA=\frac{-y_2 \tilde{f}}{W(y_1,y_2)},
\quad DB=\frac{y_1 \tilde{f}}{W(y_1,y_2)}
}
という微分方程式となる.これより
A
{\displaystyle A}
B
{\displaystyle B}
A
=
∫
t
0
t
−
y
2
(
t
′
)
f
~
(
t
′
)
W
(
t
′
;
y
1
,
y
2
)
d
t
′
,
B
=
∫
t
0
t
y
1
(
t
′
)
f
~
(
t
′
)
W
(
t
′
;
y
1
,
y
2
)
d
t
′
.
.
.
(
24
)
{\displaystyle \begin{align}
A=\int_{t_0}^t \frac{-y_2(t') \tilde{f}(t')}{W(t';y_1,y_2)}dt',
\quad B=\int_{t_0}^t \frac{y_1(t') \tilde{f}(t')}{W(t';y_1,y_2)}dt'
...(24)\end{align}}
のように表わすことができるので,特殊解の定義式(17)より
y
0
(
t
)
=
A
(
t
)
y
1
(
t
)
+
B
(
t
)
y
2
(
t
)
=
∫
t
0
t
y
2
(
t
)
y
1
(
t
′
)
−
y
1
(
t
)
y
2
(
t
′
)
W
(
t
′
;
y
1
,
y
2
)
f
~
(
t
′
)
d
t
′
{\displaystyle \begin{align}
y_0(t)&=A(t) y_1(t)+B(t) y_2(t)\\
&=\int_{t_0}^t \frac{y_2(t)y_1(t')-y_1(t)y_2(t') }{W(t';y_1,y_2)}\tilde{f}(t')dt'
\end{align}}
が得られる.そこで
G
(
t
,
t
′
)
=
{
y
2
(
t
)
y
1
(
t
′
)
−
y
1
(
t
)
y
2
(
t
′
)
W
(
t
′
;
y
1
,
y
2
)
t
≥
t
′
0
t
<
t
′
.
.
.
(
25
)
{\displaystyle \begin{align}
G(t,t')=\begin{cases} \frac{y_2(t)y_1(t')-y_1(t)y_2(t') }{W(t';y_1,y_2)} & t \ge t' \\ 0 & t<t' \end{cases}
...(25)\end{align}}
とおけば,上の式は
y
0
(
t
)
=
∫
t
0
∞
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
.
.
.
(
26
)
{\displaystyle \begin{align}
y_0(t)=\int_{t_0}^\infty G(t,t')\tilde{f}(t')dt'
...(26)\end{align}}
となる.したがって
y
{\displaystyle y}
y
(
t
)
=
∫
t
0
∞
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
+
c
1
y
1
(
t
)
+
c
2
y
2
(
t
)
.
.
.
(
27
)
{\displaystyle \begin{align}
y(t)=\int_{t_0}^\infty G(t,t')\tilde{f}(t')dt'+c_1 y_1(t)+c_2 y_2(t)
...(27)\end{align}}
となる.当初の目的の方程式の解
x
(
t
)
{\displaystyle x(t)}
y
(
t
)
=
e
β
t
x
(
t
)
,
f
~
(
t
)
=
e
β
t
f
(
t
)
.
.
.
(
6
)
{\displaystyle \begin{align}
y(t)=e^{\beta t} x(t) ,\quad \tilde{f}(t)=e^{\beta t}f(t)
...(6)\end{align}}
より
x
(
t
)
=
∫
t
0
∞
e
−
β
t
G
(
t
,
t
′
)
e
β
t
′
f
(
t
′
)
d
t
′
+
c
1
e
−
β
t
y
1
(
t
)
+
c
2
e
−
β
t
y
2
(
t
)
{\displaystyle
x(t)=\int_{ t_{ 0 } }^{ \infty }{e^{-\beta t}G(t,t') e^{\beta t'} f(t') d t'} +c_{ 1 }e^{ -\beta t }y_{ 1 }(t)+c_{ 2 }e^{ -\beta t }y_{ 2 }(t)
}
この後ろの2項は,
L
x
(
t
)
=
0
{\displaystyle Lx(t)=0}
x
(
t
)
=
∫
t
0
∞
e
−
β
t
G
(
t
,
t
′
)
e
β
t
′
f
(
t
)
d
t
′
+
c
1
x
1
(
t
)
+
c
2
x
2
(
t
)
.
.
.
(
28
)
{\displaystyle \begin{align}
x(t)=\int_{t_0}^\infty e^{-\beta t}G(t,t')e^{\beta t'}f(t)dt'+c_1 x_1(t)+c_2 x_2(t)
...(28)\end{align}}
これが,
x
(
t
)
{\displaystyle x(t)}
λ
≠
0
{\displaystyle \lambda\neq0}
L
0
y
=
0
{\displaystyle L_0 y=0}
y
1
(
t
)
=
e
−
λ
t
,
y
2
(
t
)
=
e
λ
t
.
.
.
(
29
)
{\displaystyle \begin{align}
y_1(t)=e^{-\lambda t},\quad y_2(t)=e^{\lambda t}
...(29)\end{align}}
このとき
W
(
y
1
,
y
2
)
{\displaystyle W(y_1,y_2)}
W
(
y
1
,
y
2
)
=
e
−
λ
t
(
λ
)
e
λ
t
−
e
λ
t
(
−
λ
)
e
−
λ
t
=
2
λ
=
C
o
n
s
t
.
.
.
.
(
30
)
{\displaystyle \begin{align}
W(y_1,y_2)=e^{-\lambda t}(\lambda)e^{\lambda t}-e^{\lambda t}(-\lambda)e^{-\lambda t}=2\lambda=Const.
...(30)\end{align}}
となり,Green関数は
G
(
t
,
t
′
)
=
1
2
λ
{
e
λ
(
t
−
t
′
)
−
e
−
λ
(
t
−
t
′
)
t
≥
t
′
0
t
<
t
′
.
.
.
(
31
)
{\displaystyle \begin{align}
G(t,t')=\frac {1}{ 2\lambda }\begin{cases} e^{\lambda(t-t')}-e^{-\lambda(t-t')} & t \ge t' \\ 0 & t<t' \end{cases}
...(31)\end{align}}
となる.もし
λ
=
0
{\displaystyle \lambda=0}
y
1
(
t
)
=
1
,
y
2
(
t
)
=
t
.
.
.
(
32
)
{\displaystyle \begin{align}
y_1(t)=1,\quad y_2(t)=t
...(32)\end{align}}
y
{\displaystyle y}
y
0
(
t
)
=
∫
t
0
t
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
=
∫
t
0
∞
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
{\displaystyle
y_0(t)=\int_{t_0}^t G(t,t')\tilde{f}(t')dt'=\int_{t_0}^\infty G(t,t')\tilde{f}(t')dt'
}
に関係する
F
(
t
,
t
0
)
=
∫
t
0
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
.
.
.
(
33
)
{\displaystyle \begin{align}
F(t,t_0)=\int^{t_0} G(t,t')\tilde{f}(t')dt'
...(33)\end{align}}
という量を計算してみれば,
W
=
C
o
n
s
t
.
{\displaystyle W=Const.}
F
=
∫
t
0
y
2
(
t
)
y
1
(
t
′
)
−
y
1
(
t
)
y
2
(
t
′
)
W
f
~
(
t
′
)
d
t
′
=
−
1
W
(
∫
t
0
y
2
(
t
′
)
f
(
t
′
)
d
t
′
)
y
1
(
t
)
+
1
W
(
∫
t
0
y
1
(
t
′
)
f
(
t
′
)
d
t
′
)
y
2
(
t
)
{\displaystyle \begin{align}
F&=\int^{t_0} \frac{y_2(t)y_1(t')-y_1(t)y_2(t') }{W} \tilde{f}(t')dt'\\
&=-\frac 1 W\left(\int^{t_0} y_2(t')f(t')dt'\right)y_1(t)\\
&\quad +\frac 1 W\left(\int^{t_0} y_1(t')f(t')dt'\right)y_2(t)
\end{align}}
これは
F
=
C
1
′
y
1
(
t
)
+
C
2
′
y
2
(
t
)
.
.
.
(
34
)
{\displaystyle \begin{align}
F=C'_1 y_1(t)+C'_2 y_2(t)
...(34)\end{align}}
と書ける.この
C
′
{\displaystyle C'}
t
{\displaystyle t}
y
{\displaystyle y}
y
(
t
)
=
∫
t
0
t
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
+
c
1
y
1
(
t
)
+
c
2
y
2
(
t
)
=
∫
t
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
−
∫
t
0
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
+
c
1
y
1
(
t
)
+
c
2
y
2
(
t
)
=
∫
t
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
+
(
c
1
−
C
1
′
)
y
1
(
t
)
+
(
c
2
−
C
2
′
)
y
2
(
t
)
{\displaystyle \begin{align}
y(t)
&=\int_{t_0}^{t} G(t,t')\tilde{f}(t')dt'+c_1 y_1(t)+c_2 y_2(t)\\
&=\int^{t} G(t,t')\tilde{f}(t')dt'-\int^{t_0} G(t,t')\tilde{f}(t')dt'+c_1 y_1(t)+c_2 y_2(t)\\
&=\int^{t} G(t,t')\tilde{f}(t')dt'+(c_1 -C'_1) y_1(t)+(c_2 -C'_2) y_2(t)\\
\end{align}}
これは
y
(
t
)
=
∫
t
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
+
C
1
y
1
(
t
)
+
C
2
y
2
(
t
)
.
.
.
(
35
)
{\displaystyle \begin{align}
y(t)=\int^{t} G(t,t')\tilde{f}(t')dt'+C_1 y_1(t)+C_2 y_2(t)\\
...(35)\end{align}}
と書くことができる.したがって
x
(
t
)
{\displaystyle x(t)}
x
(
t
)
=
∫
t
e
−
β
t
G
(
t
,
t
′
)
e
β
t
′
f
(
t
′
)
d
t
′
+
C
1
x
1
(
t
)
+
C
2
x
2
(
t
)
.
.
.
(
36
)
{\displaystyle \begin{align}
x(t)=\int^{t} e^{-\beta t}G(t,t')e^{\beta t'}f(t')dt'+C_1 x_1(t)+C_2 x_2(t)
...(36)\end{align}}
と書くことができる.
2-5(d) [ ] 試しに
L
x
=
f
{\displaystyle L x=f}
x
{\displaystyle x}
L
x
=
f
,
L
=
D
2
+
2
β
D
+
γ
{\displaystyle
Lx=f, \quad L=D^2+2\beta D+\gamma
}
ここで,
L
x
k
=
0
{\displaystyle Lx_k=0}
x
1
,
x
2
{\displaystyle x_1, x_2}
W
(
x
1
,
x
2
)
=
|
x
1
x
2
D
x
1
D
x
2
|
.
.
.
(
37
)
{\displaystyle
W(x_{1},x_{2})=
\begin{vmatrix} x_{ 1 } & x_{ 2 } \\ Dx_{ 1 } & Dx_{ 2 } \end{vmatrix}
\quad ...(37)
}
は,その時間変化が
d
W
d
t
=
|
D
x
1
D
x
2
D
2
x
1
D
2
x
2
|
=
−
|
D
x
1
D
x
2
−
2
β
D
x
1
−
2
β
D
x
2
|
−
|
D
x
1
D
x
2
−
γ
x
1
−
γ
x
2
|
=
γ
|
x
1
x
2
D
x
1
D
x
2
|
=
γ
W
(
x
1
,
x
2
)
.
.
.
(
38
)
{\displaystyle
\begin{align}
\frac {dW}{d t}
&=\begin{vmatrix}D x_{ 1 } & Dx_{ 2 } \\ D^2x_{ 1 } & D^2x_{ 2 } \end{vmatrix}\\
&=-\begin{vmatrix}D x_{ 1 } & Dx_{ 2 } \\ -2\beta Dx_{ 1 } & -2\beta Dx_{ 2 } \end{vmatrix}
-\begin{vmatrix}D x_{ 1 } & Dx_{ 2 } \\ -\gamma x_{ 1 } & -\gamma x_{ 2 } \end{vmatrix}\\
&=\gamma \begin{vmatrix} x_{ 1 } & x_{ 2 } \\ Dx_{ 1 } & Dx_{ 2 } \end{vmatrix}=\gamma W(x_{1},x_{2})
\quad ...(38)
\end{align}
}
だから,ゼロではないが定数ではない.
以前と同様に特殊解を
x
0
(
t
)
=
A
(
t
)
x
1
(
t
)
+
B
(
t
)
x
2
(
t
)
.
.
.
(
39
)
{\displaystyle
x_0(t)=A(t)x_1(t)+B(t)x_2(t)\quad ...(39)
}
として
(
D
A
)
x
1
+
(
D
B
)
x
2
=
0
.
.
.
(
40
)
{\displaystyle
(DA)x_1+(DB)x_2=0\quad ...(40)
}
とすると,
D
x
0
=
A
D
x
1
+
B
D
x
2
D
2
x
0
=
(
D
A
)
(
D
x
1
)
+
A
(
D
2
x
1
)
+
(
D
B
)
(
D
x
2
)
+
B
(
D
2
x
2
)
{\displaystyle
\begin{align}
Dx_0&=ADx_1+BDx_2\\
D^2 x_0&=(DA)(Dx_1)+A(D^2 x_1)+(DB)(Dx_2)+B(D^2 x_2)
\end{align}
}
であり,
D
2
x
0
=
−
2
β
D
x
0
+
γ
x
0
+
f
=
−
2
β
A
D
x
1
−
2
β
B
D
x
2
−
γ
A
x
1
−
γ
B
x
2
+
f
{\displaystyle
\begin{align}
D^2x_0
&= -2\beta Dx_0+\gamma x_0+f\\
&= -2\beta ADx_1-2\beta BDx_2-\gamma Ax_1-\gamma Bx_2+f
\end{align}
}
だから,
(
D
A
)
(
D
x
1
)
+
(
D
B
)
(
D
x
2
)
=
f
.
.
.
(
41
)
{\displaystyle
(DA)(Dx_1)+(DB)(Dx_2)=f\quad ...(41)
}
したがって,同様に
(
D
A
D
B
)
=
1
W
(
x
1
,
x
2
)
(
D
x
2
−
x
2
−
D
x
1
x
1
)
(
0
f
)
{\displaystyle
\begin{pmatrix} DA \\ DB \end{pmatrix}=\frac{1}{W(x_1,x_2)}\begin{pmatrix} Dx_{ 2 } & -x_{ 2 } \\ -Dx_{ 1 } & x_{ 1 } \end{pmatrix}\begin{pmatrix} 0 \\ f \end{pmatrix}
}
D
A
=
−
x
2
f
~
W
(
x
1
,
x
2
)
,
D
B
=
x
1
f
~
W
(
x
1
,
x
2
)
{\displaystyle
DA=\frac{-x_2 \tilde{f}}{W(x_1,x_2)},
\quad DB=\frac{x_1 \tilde{f}}{W(x_1,x_2)}
}
A
(
t
)
=
∫
t
0
t
−
x
2
(
t
′
)
f
(
t
′
)
W
(
t
′
;
y
1
,
y
2
)
d
t
′
,
B
(
t
)
=
∫
t
0
t
x
1
(
t
′
)
f
(
t
′
)
W
(
t
′
;
x
1
,
x
2
)
d
t
′
.
.
.
(
42
)
{\displaystyle
A(t)=\int_{t_0}^t \frac{-x_2(t') f(t')}{W(t';y_1,y_2)}dt',
\quad B(t)=\int_{t_0}^t \frac{x_1(t') f(t')}{W(t';x_1,x_2)}dt'
\quad ...(42)
}
となるので
x
0
(
t
)
=
∫
t
0
t
x
1
(
t
′
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
.
.
.
(
43
)
{\displaystyle
x_0 (t)=\int_{t_0}^{t}{\frac{x_1(t')x_2(t)-x_1(t)x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}
\quad ...(43)
}
が得られる.
D
x
0
(
t
)
=
1
Δ
t
∫
t
0
t
+
Δ
t
x
1
(
t
′
)
x
2
(
t
+
Δ
t
)
−
x
1
(
t
+
Δ
t
)
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
−
1
Δ
t
∫
t
0
t
x
1
(
t
′
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
=
1
Δ
t
∫
t
0
t
+
Δ
t
x
1
(
t
′
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
−
1
Δ
t
∫
t
0
t
x
1
(
t
′
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
+
1
Δ
t
∫
t
0
t
x
1
(
t
′
)
[
D
x
2
(
t
)
Δ
t
]
−
[
D
x
1
(
t
)
Δ
t
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
=
1
Δ
t
∫
t
t
+
Δ
t
x
1
(
t
′
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
+
∫
t
0
t
x
1
(
t
′
)
[
D
x
2
(
t
)
]
−
[
D
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
=
x
1
(
t
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
)
W
(
x
1
(
t
)
,
x
2
(
t
)
)
f
(
t
)
+
∫
t
0
t
x
1
(
t
′
)
[
D
x
2
(
t
)
]
−
[
D
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
=
∫
t
0
t
x
1
(
t
′
)
[
D
x
2
(
t
)
]
−
[
D
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
.
.
.
(
44
)
{\displaystyle
\begin{align}
Dx_0(t)
&=\frac{1}{\Delta t}\int_{t_0}^{t+\Delta t}{\frac{x_1(t')x_2(t+\Delta t)-x_1(t+\Delta t)x_2(t')}{W(x_1(t'),x_2(t'))}f(t')dt'}\\
&-\frac{1}{\Delta t}\int_{t_0}^{t}{\frac{x_1(t')x_2(t)-x_1(t)x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&=\frac{1}{\Delta t}\int_{t_0}^{t+\Delta t}{\frac{x_1(t')x_2(t)-x_1(t)x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&-\frac{1}{\Delta t}\int_{t_0}^{t}{\frac{x_1(t')x_2(t)-x_1(t)x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&+\frac{1}{\Delta t}\int_{t_0}^{t}{\frac{x_1(t')[Dx_2(t)\Delta t]-[Dx_1(t)\Delta t]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&=\frac{1}{\Delta t}\int_{t}^{t+\Delta t}{\frac{x_1(t')x_2(t)-x_1(t)x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&+\int_{t_0}^{t}{\frac{x_1(t')[Dx_2(t)]-[Dx_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&=\frac{x_1(t)x_2(t)-x_1(t)x_2(t)}{W(x_1(t),x_2(t))}f(t)\\
&+\int_{t_0}^{t}{\frac{x_1(t')[Dx_2(t)]-[Dx_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&=\int_{t_0}^{t}{\frac{x_1(t')[Dx_2(t)]-[Dx_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}
\quad...(44)
\end{align}
}
同様の計算で,
D
2
x
0
(
t
)
=
x
1
(
t
)
[
D
x
2
(
t
)
]
−
[
D
x
1
(
t
)
]
x
2
(
t
)
W
(
x
1
(
t
)
,
x
2
(
t
)
)
f
(
t
)
+
∫
t
0
t
x
1
(
t
′
)
[
D
2
x
2
(
t
)
]
−
[
D
2
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
=
f
(
t
)
+
∫
t
0
t
x
1
(
t
′
)
[
D
2
x
2
(
t
)
]
−
[
D
2
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
.
.
.
(
45
)
{\displaystyle
\begin{align}
D^2x_0(t)
&=\frac{x_1(t)[Dx_2(t)]-[Dx_1(t)]x_2(t)}{W(x_1(t),x_2(t))}f(t)\\
&+\int_{t_0}^{t}{\frac{x_1(t')[D^2x_2(t)]-[D^2x_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&=f(t)
+\int_{t_0}^{t}{\frac{x_1(t')[D^2x_2(t)]-[D^2x_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}
\quad...(45)
\end{align}
}
したがって
L
x
0
(
t
)
=
f
(
t
)
+
∫
t
0
t
x
1
(
t
′
)
[
L
x
2
(
t
)
]
−
[
L
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
=
f
(
t
)
.
.
.
(
46
)
{\displaystyle
\begin{align}
Lx_0(t)
&=f(t)+\int_{t_0}^{t}{\frac{x_1(t')[Lx_2(t)]-[Lx_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&=f(t)
\quad...(46)
\end{align}
}
である.
G
(
t
,
t
′
)
=
{
x
1
(
t
′
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
t
≥
t
′
0
t
<
t
′
.
.
.
(
47
)
{\displaystyle
G(t,t')=
\begin{cases}
\frac{x_1(t')x_2(t)-x_1(t)x_2(t')}{W(x_1(t'),x_2(t'))} & t\ge t' \\
0 & t < t'
\end{cases}
\quad ...(47)
}
と定義して,これを
t
′
:
(
t
0
,
∞
)
{\displaystyle t':(t_0,\infty)}
x
¯
0
(
t
)
=
∫
t
0
∞
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
.
.
.
(
48
)
{\displaystyle
\bar{x}_0 (t)=\int_{t_0}^{\infty}{G(t,t')f(t')d t'}
\quad ...(48)
}
は
L
x
=
f
{\displaystyle L x=f}
L
{\displaystyle L}
t
{\displaystyle t}
∫
t
0
∞
d
t
′
{\displaystyle \int_{t_0}^{\infty}{dt'}}
t
{\displaystyle t}
L
x
¯
0
(
t
)
=
L
∫
t
0
∞
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
=
∫
t
0
∞
[
L
G
(
t
,
t
′
)
]
f
(
t
′
)
d
t
′
.
.
.
(
49
)
{\displaystyle
\begin{align}
L\bar{x}_0(t)
&=L\int_{t_0}^{\infty}{G(t,t')f(t')d t'}\\
&=\int_{t_0}^{\infty}{[LG(t,t')]f(t')d t'}
\quad...(49)
\end{align}
}
具体的に計算すると
D
x
¯
0
(
t
)
=
∫
t
0
∞
[
D
G
(
t
,
t
′
)
]
f
(
t
′
)
d
t
′
=
∫
t
0
∞
1
Δ
t
G
(
t
+
Δ
t
,
t
′
)
f
(
t
′
)
d
t
′
−
∫
t
0
∞
1
Δ
t
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
=
∫
t
0
t
+
Δ
t
1
Δ
t
G
(
t
+
Δ
t
,
t
′
)
f
(
t
′
)
d
t
′
−
∫
t
0
t
1
Δ
t
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
=
∫
t
t
+
Δ
t
1
Δ
t
G
(
t
+
Δ
t
,
t
′
)
f
(
t
′
)
d
t
′
+
∫
t
0
t
1
Δ
t
G
(
t
+
Δ
t
,
t
′
)
f
(
t
′
)
d
t
′
−
∫
t
0
t
1
Δ
t
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
=
G
(
t
+
Δ
t
,
t
)
f
(
t
)
+
∫
t
0
t
∂
∂
t
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
.
.
.
(
50
)
{\displaystyle
\begin{align}
D\bar{x}_0(t)
&=\int_{t_0}^{\infty}{[DG(t,t')]f(t')d t'}\\
&=\int_{t_0}^{\infty}{\frac{1}{\Delta t}G(t+\Delta t,t')f(t')d t'}\\
&-\int_{t_0}^{\infty}{\frac{1}{\Delta t}G(t,t')f(t')d t'}\\
&=\int_{t_0}^{t+\Delta t}{\frac{1}{\Delta t}G(t+\Delta t,t')f(t')d t'}\\
&-\int_{t_0}^{t}{\frac{1}{\Delta t}G(t,t')f(t')d t'}\\
&=\int_{t}^{t+\Delta t}{\frac{1}{\Delta t}G(t+\Delta t,t')f(t')d t'}\\
&+\int_{t_0}^{t}{\frac{1}{\Delta t}G(t+\Delta t,t')f(t')d t'}\\
&-\int_{t_0}^{t}{\frac{1}{\Delta t}G(t,t')f(t')d t'}\\
&=G(t+\Delta t,t)f(t)\\
&+\int_{t_0}^{t}{\frac{\partial}{\partial t}G(t,t')f(t')d t'}
\quad...(50)
\end{align}
}
ところが,(49)の定義をみると
G
{\displaystyle G}
t
>
t
′
{\displaystyle t>t'}
G
(
t
+
Δ
t
,
t
)
=
x
1
(
t
)
x
2
(
t
+
Δ
t
)
−
x
1
(
t
+
Δ
t
)
x
2
(
t
)
W
(
x
1
(
t
)
,
x
2
(
t
)
)
=
x
1
(
t
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
)
W
(
x
1
(
t
)
,
x
2
(
t
)
)
=
1
.
.
.
(
51
)
{\displaystyle
\begin{align}
G(t+\Delta t,t)
&=\frac{x_1(t)x_2(t+\Delta t)-x_1(t+\Delta t)x_2(t)}{W(x_1(t),x_2(t))}\\
&=\frac{x_1(t)x_2(t)-x_1(t)x_2(t)}{W(x_1(t),x_2(t))}\\
&=1
\quad...(51)
\end{align}
}
したがって,先の計算は
D
x
¯
0
(
t
)
=
f
(
t
)
+
∫
t
0
t
∂
∂
t
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
=
f
(
t
)
+
∫
t
0
t
x
1
(
t
′
)
[
D
x
2
(
t
)
]
−
[
D
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
.
.
.
(
52
)
{\displaystyle
\begin{align}
D\bar{x}_0(t)
&=f(t)+\int_{t_0}^{t}{\frac{\partial}{\partial t}G(t,t')f(t')d t'}\\
&=f(t)+\int_{t_0}^{t}{\frac{x_1(t')[Dx_2(t)]-[Dx_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}
\quad...(52)
\end{align}
}
となってしまう.この時点で
f
(
t
)
{\displaystyle f(t) }
D
2
x
¯
0
(
t
)
=
D
f
(
t
)
+
+
f
(
t
)
+
∫
t
0
t
x
1
(
t
′
)
[
D
2
x
2
(
t
)
]
−
[
D
2
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
.
.
.
(
53
)
{\displaystyle
\begin{align}
D^2\bar{x}_0(t)
&=Df(t)+\\
&+f(t)+\int_{t_0}^{t}{\frac{x_1(t')[D^2x_2(t)]-[D^2x_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}
\quad...(53)
\end{align}
}
となるので
L
x
¯
0
(
t
)
=
D
f
(
t
)
+
f
(
t
)
+
∫
t
0
t
x
1
(
t
′
)
[
L
x
2
(
t
)
]
−
[
L
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
=
D
f
(
t
)
+
f
(
t
)
.
.
.
(
53
)
{\displaystyle
\begin{align}
L\bar{x}_0(t)
&=Df(t)+f(t)\\
&+\int_{t_0}^{t}{\frac{x_1(t')[Lx_2(t)]-[Lx_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&=Df(t)+f(t)
\quad...(53)
\end{align}
}
このように
D
f
(
t
)
{\displaystyle Df(t)}
以上のように,(47)で定義した関数を使った(48)式は,特殊解にはならない.
2-7 糸の長さが伸びる振り子 [ ] 糸が時間に比例して伸びる場合の振り子の運動を議論する問題。めちゃくちゃ時間かかりました。
なかなかやばい問題でしたね、、、
まず運動方程式を立てますが、θではなくxについて運動方程式を立てます。またこのときlの伸び縮みによって働く力も忘れないでください(結局加速度は0になるので関係ありませんが・・・)
この運動方程式を変形して次のようにします。
z
d
2
x
d
z
2
+
x
=
0
{\displaystyle z\frac{d^2 x}{dz^2}+x=0}
ここからが大変でした、、、Besselの微分方程式に帰着させて、Bessel関数とNeumann関数の線型和としてこの方程式の解を表現するのですが、そのためにはx=z^α*X(Z)、Z=γz^βと置いて(1)式に代入します。
(参考:「糸の方程式の境界条件について」URL:http://takeno.iee.niit.ac.jp/~shige/math/lecture/misc/data/lstring1.pdf )
そしてα、β、γを調整するとBesselの微分方程式に直しことができて、結果的に(1)式を解くことができます。
ちなみにθ(t)の時間変化をグラフにすると以下のようになります。
教科書の式参照。g=9.807,α=1/8,A=1,B=1とした。
ちなみに漸近公式ですが、次の図のようにかなり良い近似を与えます。
ベッセル関数:青 漸近式:緑
ノイマン関数:青 漸近形:緑
そのためθ(t)の式にこの漸近公式を代入します。
すると三角関数の線型和として表現できるため、振動の周期を近似的に求められる。
最後は断熱定理(次の問題にも出てくる)。
断熱定理は量子力学やプラズマ物理学などでよく出てきて、最近では量子アニーリングにも応用されているが、最も基本的なものの一つとして振り子の振動数とエネルギーの比がある。
ここでは振動数、エネルギーをともに1から求めて断熱定理を示している。
2-14 Lenzベクトル [ ] 解説ですPDFです。
https://drive.google.com/file/d/0B4JUep9TeHAWMmZncTc2V2NzUVE/view?usp=sharing
軌道のgifアニメです。(また、貼り直します)
*更新履歴
17.03.14 軽微な修正
2-15 中心力 解の安定性 [ ] (a)中心力が働いている中での円軌道の安定性について議論する問題です。何となくどんな中心力でも安定なような気がしますが、実はそんなことはなく、中心力の性質によります。手順としてはまず、等速円運動しているときの極座標での運動方程式を書き、さらに
r
=
r
0
+
δ
r
(
t
)
,
θ
˙
=
ω
0
+
δ
ω
(
t
)
{\displaystyle r=r_0 + \delta r (t),\dot{\theta}=\omega_0 + \delta \omega (t)}
r
2
ω
=
r
0
2
ω
0
(
1
+
ϵ
)
,
r
=
r
0
+
ϵ
ξ
1
{\displaystyle r^2\omega=r_0^2\omega_0(1+\epsilon),r=r_0+\epsilon\xi_1}
δ
r
¨
=
(
−
3
ω
0
2
−
1
m
f
′
(
r
0
)
)
δ
r
+
C
{\displaystyle \ddot{\delta r}=(-3\omega_0^2-\frac{1}{m}f'(r_0))\delta r + C}
解が安定であるということはこのずれが有限に収まるということなので、
−
3
ω
0
2
−
1
m
f
′
(
r
0
)
<
0
{\displaystyle -3\omega_0^2-\frac{1}{m}f'(r_0)<0}
ここで仮定した「ずれ」のことを「摂動」と言います。量子力学の近似法としても出てきます。
Newton力学のもとで計算するとエネルギーが負である限り解は安定だとわかりますが、実は一般相対論で計算すると必ずしもそうではないということが分かります。
(b)
δ
r
{\displaystyle \delta r }
δ
ω
{\displaystyle \delta\omega}
(c)軌道が閉じる条件について考えます。t=0からスタートしてt=Tで軌道が閉じるとすると
r
(
0
)
=
r
(
T
)
,
r
˙
(
0
)
=
r
˙
(
T
)
,
θ
(
0
)
+
2
n
π
=
θ
(
T
)
{\displaystyle r(0)=r(T),\dot{r}(0)=\dot{r}(T),\theta(0)+2n\pi=\theta(T)}
ν
0
ω
1
=
p
{\displaystyle \frac{\nu_0}{\omega_1}=p}
ν
0
{\displaystyle \nu_0}
ω
0
{\displaystyle \omega_0}
θ
˙
{\displaystyle \dot{\theta}}
ν
0
{\displaystyle \nu_0}
(d)
2-16 散乱断面積 [ ] (a)具体的な計算は大して難しいことをやっていない上にごちゃごちゃしているのでここでは省略。ここに載せることとして有用なのはむしろΘ=π-2θ_0になる理由でしょう。解答解説にも書いてありますがもう少し具体的に書こうと思います。
2-16(a)
(b)「散乱の微分断面積」とは何ぞや、という感じですね。解答の計算から、これは「散乱された後、ある立体角要素dΩに粒子がいるとしたときの、入射粒子の存在しうる面積要素dσ」という感じです。これでもなんだかピンとこないけど、例えば散乱の条件設定を「一定の面密度で、同じ速度の粒子を入射していく」と考えるともう少し考えやすくなります。このとき粒子数は面積要素に比例するので「散乱されたのち、ある立体角要素dΩにいる粒子の数」と考えることもできますね。これだともう少しイメージしやすいのではないでしょうか。Wikipedia
2-19 ヴィリアル定理 [ ] (a)ヴィリアル定理という定理を示すために前段階の問題です。計算自体はそこまで難しくなく、素直に(左辺)=…と計算していけば自然と示すべき式を得られることでしょう。途中で運動方程式
m
x
i
¨
=
−
∂
V
(
r
→
)
∂
x
i
{\displaystyle m\ddot{x_i}=-\frac{\partial V(\vec{r})}{\partial x_i}}
∑
i
=
1
3
x
i
∂
V
(
r
→
)
∂
x
i
=
n
V
(
r
→
)
{\displaystyle \sum^{3}_{i=1}x_i\frac{\partial V(\vec{r})}{\partial x_i}=nV(\vec{r})}
「ときわ台学」より 「ビリアル定理夜話」より
3-4 放物面を転がる質点の運動 [ ] 放物面上の運動です。といっても
y
{\displaystyle y}
(b)加速度を求めるには、(i)の両辺を微分します。すると加速度のx成分が出てきます。明らかにy成分は0です。z成分は、
d
z
d
t
=
x
a
d
x
d
t
{\displaystyle \frac{dz}{dt}=\frac{x}{a}\frac{dx}{dt}}
m
x
¨
{\displaystyle m\ddot{x}}
m
z
¨
+
m
g
{\displaystyle m\ddot{z}+mg}
すると抗力のx成分:z成分の比が
−
x
:
a
{\displaystyle -x:a}
ちなみに(この問題では実質2次元なのですぐわかりますが)曲面の法線ベクトルは
g
(
x
,
y
,
z
)
=
1
2
a
(
x
2
+
y
2
)
−
z
{\displaystyle g(x,y,z)=\frac{1}{2a}(x^2+y^2)-z}
として
∇
g
{\displaystyle \nabla g}
(c) 加速度が求まったので運動方程式を立てます。問題文の通りに近似を施すとお馴染みの単振動の方程式が現れます。そこから周期が求まります。
ちなみに解答では速度の式を直接積分していました。(d)はこの方法で解きます。
(d)速度の式がわかっているので、これを積分します。かなりごつい式です。変数変換は示すべき(iii)式の積分範囲をよく見れば気がつくでしょうか。。。といった具合ですが、楕円関数の積分は有名なやつなのでここで経験しておくといいんじゃないかと思います。
ここで出てくるのは第2種完全楕円積分です。
E
(
k
)
=
∫
0
π
2
1
−
k
2
sin
2
θ
d
θ
{\displaystyle E(k)=\int_0^\frac{\pi}{2} \sqrt{1-k^2\sin^2\theta} d\theta}
単振り子の等時性は微小角じゃないと破れるよ、みたいな話題に出てくるのは第1種完全楕円積分の方です。
K
(
k
)
=
∫
0
π
2
d
θ
1
−
k
2
sin
2
θ
{\displaystyle K(k)=\int_0^\frac{\pi}{2} \frac{d\theta}{\sqrt{1-k^2\sin^2\theta}}}
この2つの式ですが、積分の中身をテーラー展開することで近似値を求めることができます。
また、これを推し進めると楕円積分を無限級数で展開することもできます。ここらへんの話題は色々な本やwebに載っているので調べてみると面白いと思います。
(Kohei.I @hybrid_rainb0w)
3-8 PLK法 [ ] 非線形な微分方程式を取り扱うための近似法、PLK法についての問題です。この手法は2-15でも使っているので、なんだかここにきて帰ってきたのかって感じになりまね。
θ
1
¨
+
ω
0
2
θ
1
=
(
2
A
ω
0
ω
1
+
3
4
ω
0
3
A
3
)
cos
ω
0
t
+
1
4
ω
0
2
A
3
cos
3
ω
0
t
{\displaystyle \ddot{\theta_1}+\omega_0^2\theta_1=\left( 2A\omega_0\omega_1+\frac{3}{4}\omega_0^3A^3 \right)\cos \omega_0t+\frac{1}{4}\omega_0^2A^3\cos 3\omega_0t}
3-8 解の様子
3-15 Ljapunov関数(力学系) [ ] 与えられる微分方程式(力学系)の原点(平衡点)における安定性をLjapunov関数を見つけることで示す問題です。問題自体はLjapunov関数の定義に従って計算を進めていくと簡単に求めることができます。
(補足1)Ljapunovの直接法の直観的な説明(厳密には正しくありません) [ ] 座標平面においてLjapunov関数の「等位面」
V
−
1
(
c
i
)
{\displaystyle V^{-1}(c_i)}
V
˙
≤
0
{\displaystyle \dot{V} \leq 0}
V
−
1
(
c
j
)
{\displaystyle V^{-1}(c_j)}
(
c
i
≥
c
j
)
{\displaystyle (c_i \geq c_j)}
V
−
1
(
0
)
{\displaystyle V^{-1}(0)}
[ ] [参考:Hirsch,Smale,Devaney「力学系入門」(厳密な証明も載っています)]
(補足2) 双曲的安定性 [ ] 実はこの問題はLjapunov関数を持ち出すまでもありません。問題の微分方程式を線形化した微分方程式の固有値を調べるとその実部が負になるため、そこからすぐに平衡点が安定であると結論づけることができるのです。
(Kohei.I @hybrid_rainb0w)
4-1 座標系の回転 [ ] あまり面白くない計算筋トレ問題ですが、一応穴を埋めるような感じで何かしら書いておきます。ごくごく単純に
x
,
y
{\displaystyle x, y}
x
¨
=
ξ
¨
cos
Ω
t
−
η
¨
sin
Ω
t
−
ξ
Ω
2
cos
Ω
t
+
η
Ω
2
sin
Ω
t
−
2
(
ξ
˙
Ω
sin
Ω
t
+
η
˙
Ω
cos
Ω
t
)
{\displaystyle
\ddot{x} = \ddot{\xi}\cos\Omega t -\ddot{\eta}\sin\Omega t-\xi\Omega^2\cos\Omega t+\eta\Omega^2\sin\Omega t -2(\dot{\xi}\Omega\sin\Omega t+\dot{\eta}\Omega\cos\Omega t)
}
y
¨
=
ξ
¨
sin
Ω
t
+
η
¨
cos
Ω
t
−
ξ
Ω
2
sin
Ω
t
−
η
Ω
2
cos
Ω
t
+
2
(
ξ
˙
Ω
cos
Ω
t
−
η
˙
Ω
sin
Ω
t
)
{\displaystyle
\ddot{y} = \ddot{\xi}\sin\Omega t +\ddot{\eta}\cos\Omega t-\xi\Omega^2\sin\Omega t-\eta\Omega^2\cos\Omega t +2(\dot{\xi}\Omega\cos\Omega t-\dot{\eta}\Omega\sin\Omega t)
}
Ω
{\displaystyle \Omega}
ξ
,
η
{\displaystyle \xi, \eta}
ξ
¨
{\displaystyle \ddot{\xi}}
η
¨
{\displaystyle \ddot{\eta}}
m
[
ξ
¨
−
ξ
Ω
2
−
2
η
˙
Ω
sin
Ω
t
]
=
f
x
cos
Ω
t
+
f
y
sin
Ω
t
{\displaystyle
m\left[\ddot{\xi}-\xi\Omega^2-2\dot{\eta}\Omega\sin\Omega t\right] = f_x\cos\Omega t+f_y\sin\Omega t
}
m
[
η
¨
−
η
Ω
2
+
2
ξ
˙
Ω
cos
Ω
t
]
=
−
f
x
sin
Ω
t
+
f
y
cos
Ω
t
{\displaystyle
m\left[\ddot{\eta}-\eta\Omega^2+2\dot{\xi}\Omega\cos\Omega t\right] = -f_x\sin\Omega t+f_y\cos\Omega t
}
(
f
x
f
y
)
=
(
cos
Ω
t
−
sin
Ω
t
sin
Ω
t
cos
Ω
t
)
(
f
ξ
f
η
)
{\displaystyle
\begin{pmatrix}
f_{x}\\
f_{y}
\end{pmatrix} =
\begin{pmatrix}
\cos\Omega t & -\sin\Omega t\\
\sin\Omega t & \cos\Omega t
\end{pmatrix}\begin{pmatrix}
f_{\xi} \\
f_{\eta} \end{pmatrix}
}
m
[
ξ
¨
−
ξ
Ω
2
−
2
η
˙
Ω
sin
Ω
t
]
=
f
ξ
{\displaystyle
m\left[\ddot{\xi}-\xi\Omega^2-2\dot{\eta}\Omega\sin\Omega t\right] = f_{\xi}
}
m
[
η
¨
−
η
Ω
2
+
2
ξ
˙
Ω
cos
Ω
t
]
=
f
η
{\displaystyle
m\left[\ddot{\eta}-\eta\Omega^2+2\dot{\xi}\Omega\cos\Omega t\right] = f_{\eta}
}
m
ξ
¨
=
f
ξ
+
m
ξ
Ω
2
+
2
m
η
˙
Ω
sin
Ω
t
{\displaystyle
m\ddot{\xi}= f_{\xi}+m\xi\Omega^2+2m\dot{\eta}\Omega\sin\Omega t
}
m
η
¨
=
f
η
+
m
η
Ω
2
−
2
m
ξ
˙
Ω
cos
Ω
t
{\displaystyle
m\ddot{\eta}= f_{\eta}+m\eta\Omega^2-2m\dot{\xi}\Omega\cos\Omega t
}
Λ
=
(
cos
Ω
t
−
sin
Ω
t
sin
Ω
t
cos
Ω
t
)
{\displaystyle
\Lambda=\begin{pmatrix}
\cos\Omega t & -\sin\Omega t\\
\sin\Omega t & \cos\Omega t
\end{pmatrix}
}
x
→
=
Λ
ξ
→
{\displaystyle \vec{x}=\Lambda\vec{\xi}}
x
→
¨
=
Λ
¨
ξ
→
+
2
Λ
˙
ξ
→
˙
+
Λ
ξ
→
¨
{\displaystyle
\ddot{\vec{x}}=\ddot{\Lambda}\vec{\xi}+2\dot{\Lambda}\dot{\vec{\xi}}+\Lambda\ddot{\vec{\xi}}
}
4-2 回転運動 [ ] この問題では重力と、重力と平行な方向の抗力は考えないものとします。どうせあったとしてもこの二つは釣り合うので物体の運動には影響しません。さて、水平面上の運動をする物体を、4-1で考えた回転する座標系で見ることを考えましょう。4-1でやったように、その運動方程式は次のように書けます。
m
ξ
¨
=
f
ξ
+
m
ξ
Ω
2
+
2
m
η
˙
Ω
sin
Ω
t
{\displaystyle
m\ddot{\xi}= f_{\xi}+m\xi\Omega^2+2m\dot{\eta}\Omega\sin\Omega t
}
m
η
¨
=
f
η
+
m
η
Ω
2
−
2
m
ξ
˙
Ω
cos
Ω
t
{\displaystyle
m\ddot{\eta}= f_{\eta}+m\eta\Omega^2-2m\dot{\xi}\Omega\cos\Omega t
}
f
ξ
{\displaystyle f_{\xi}}
ξ
{\displaystyle \xi}
η
{\displaystyle \eta }
m
ξ
¨
=
Ω
2
ξ
{\displaystyle
m\ddot{\xi} = \Omega^2\xi
}
0
=
f
η
−
2
m
ξ
˙
Ω
cos
Ω
t
{\displaystyle
0=f_{\eta}-2m\dot{\xi}\Omega\cos\Omega t
}
f
η
{\displaystyle f_{\eta}}
ξ
=
e
−
Ω
t
,
e
Ω
t
{\displaystyle
\xi=e^{-\Omega t},e^{\Omega t}
}
ξ
=
C
1
e
−
Ω
t
+
C
2
e
Ω
t
{\displaystyle
\xi=C_1e^{-\Omega t}+C_2e^{\Omega t}
}
ξ
=
l
2
(
e
−
Ω
t
+
e
Ω
t
)
{\displaystyle
\xi=\frac{l}{2}\left(e^{-\Omega t}+e^{\Omega t}\right)
}
=
l
cosh
Ω
t
{\displaystyle
\,\,\,=l\cosh\Omega t
}
f
η
=
2
m
l
Ω
2
sinh
Ω
t
cos
Ω
t
{\displaystyle
f_{\eta}=2ml\Omega^2\sinh\Omega t\cos\Omega t
}
5-1 two body problem [ ] LaTeXで作りました。順番は、左→右、一段降りて、左→右というように見ていってください。
北山慎之介 @kitashin0603























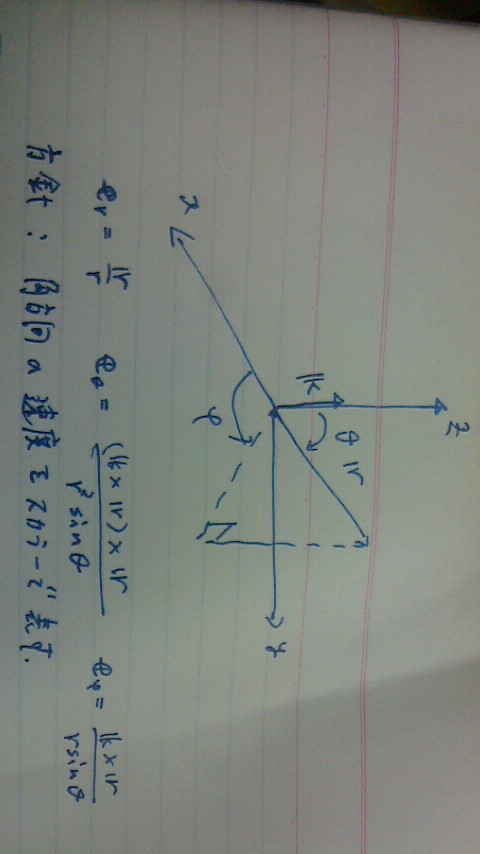

















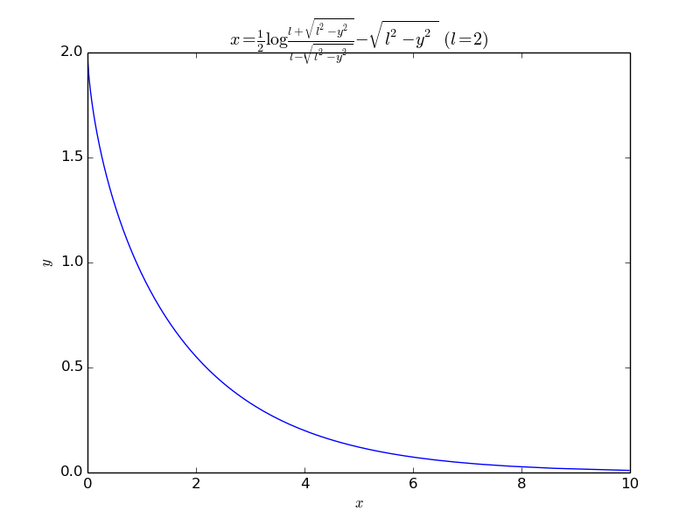
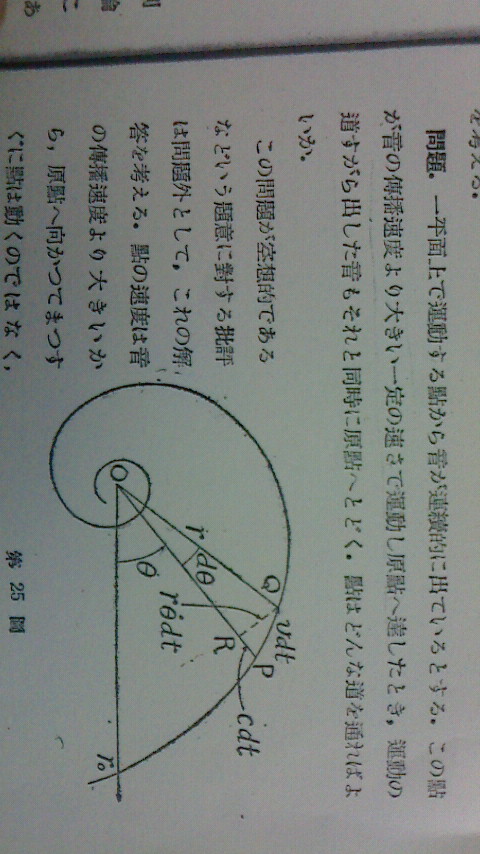
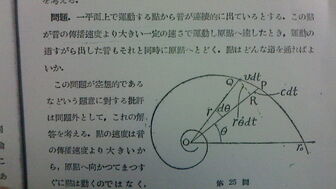




























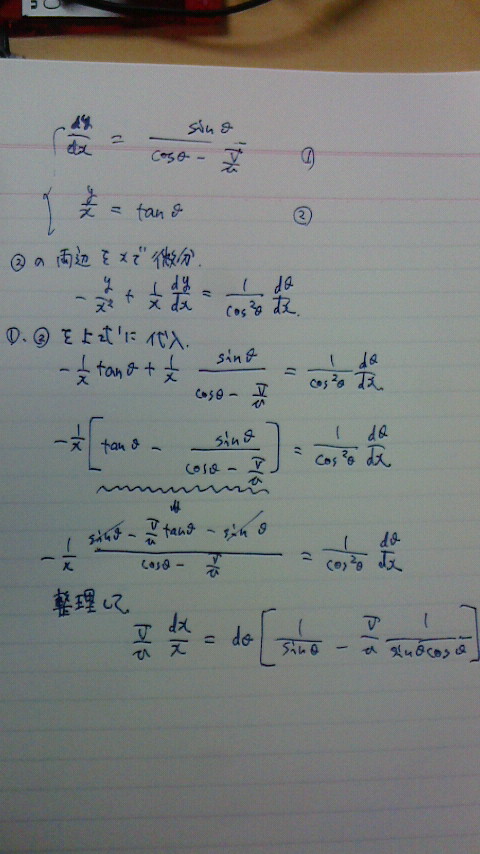















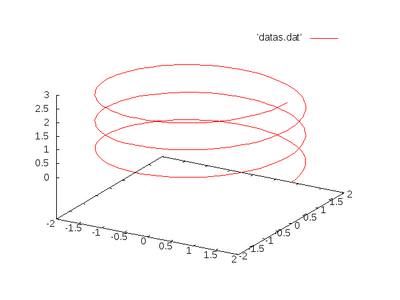


















![{\displaystyle g[(b^{2}y+2bDy+D^{2}y)+2\beta (by+Dy)+\gamma ]y=g{\tilde {f}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/a85afd30d4994f91cb2c792b5a88324e57afc806)
![{\displaystyle [(b^{2}y+2bDy+D^{2}y)+2\beta (by+Dy)+\gamma ]y={\tilde {f}}\quad ...(4)}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/86d7b879279de2a3c456392c305c44d9f1064f7f)























![{\displaystyle {\begin{aligned}L_{0}[y(t)-y_{0}(t)]=0...(15)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/d4d7d2aa4f40aaa5e5c48753f1c62e9b7c0f36e1)





































































![{\displaystyle {\begin{aligned}Dx_{0}(t)&={\frac {1}{\Delta t}}\int _{t_{0}}^{t+\Delta t}{{\frac {x_{1}(t')x_{2}(t+\Delta t)-x_{1}(t+\Delta t)x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&-{\frac {1}{\Delta t}}\int _{t_{0}}^{t}{{\frac {x_{1}(t')x_{2}(t)-x_{1}(t)x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&={\frac {1}{\Delta t}}\int _{t_{0}}^{t+\Delta t}{{\frac {x_{1}(t')x_{2}(t)-x_{1}(t)x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&-{\frac {1}{\Delta t}}\int _{t_{0}}^{t}{{\frac {x_{1}(t')x_{2}(t)-x_{1}(t)x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&+{\frac {1}{\Delta t}}\int _{t_{0}}^{t}{{\frac {x_{1}(t')[Dx_{2}(t)\Delta t]-[Dx_{1}(t)\Delta t]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&={\frac {1}{\Delta t}}\int _{t}^{t+\Delta t}{{\frac {x_{1}(t')x_{2}(t)-x_{1}(t)x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[Dx_{2}(t)]-[Dx_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&={\frac {x_{1}(t)x_{2}(t)-x_{1}(t)x_{2}(t)}{W(x_{1}(t),x_{2}(t))}}f(t)\\&+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[Dx_{2}(t)]-[Dx_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&=\int _{t_{0}}^{t}{{\frac {x_{1}(t')[Dx_{2}(t)]-[Dx_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\quad ...(44)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/25e13dc9df2b9dce9ddc86267e67ea3d56112b42)
![{\displaystyle {\begin{aligned}D^{2}x_{0}(t)&={\frac {x_{1}(t)[Dx_{2}(t)]-[Dx_{1}(t)]x_{2}(t)}{W(x_{1}(t),x_{2}(t))}}f(t)\\&+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[D^{2}x_{2}(t)]-[D^{2}x_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&=f(t)+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[D^{2}x_{2}(t)]-[D^{2}x_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\quad ...(45)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/9f1a525a8ec24034c68022e60154059579a9812c)
![{\displaystyle {\begin{aligned}Lx_{0}(t)&=f(t)+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[Lx_{2}(t)]-[Lx_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&=f(t)\quad ...(46)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/b9a6b53ac848a599ddbf7b88949e10c9056aa456)





![{\displaystyle {\begin{aligned}L{\bar {x}}_{0}(t)&=L\int _{t_{0}}^{\infty }{G(t,t')f(t')dt'}\\&=\int _{t_{0}}^{\infty }{[LG(t,t')]f(t')dt'}\quad ...(49)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/ccc37f0cb3c86a3152528b71e55ceeb250702dd5)
![{\displaystyle {\begin{aligned}D{\bar {x}}_{0}(t)&=\int _{t_{0}}^{\infty }{[DG(t,t')]f(t')dt'}\\&=\int _{t_{0}}^{\infty }{{\frac {1}{\Delta t}}G(t+\Delta t,t')f(t')dt'}\\&-\int _{t_{0}}^{\infty }{{\frac {1}{\Delta t}}G(t,t')f(t')dt'}\\&=\int _{t_{0}}^{t+\Delta t}{{\frac {1}{\Delta t}}G(t+\Delta t,t')f(t')dt'}\\&-\int _{t_{0}}^{t}{{\frac {1}{\Delta t}}G(t,t')f(t')dt'}\\&=\int _{t}^{t+\Delta t}{{\frac {1}{\Delta t}}G(t+\Delta t,t')f(t')dt'}\\&+\int _{t_{0}}^{t}{{\frac {1}{\Delta t}}G(t+\Delta t,t')f(t')dt'}\\&-\int _{t_{0}}^{t}{{\frac {1}{\Delta t}}G(t,t')f(t')dt'}\\&=G(t+\Delta t,t)f(t)\\&+\int _{t_{0}}^{t}{{\frac {\partial }{\partial t}}G(t,t')f(t')dt'}\quad ...(50)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/8d71b1bd20cb587fa12ebdca3e665a54c788f31d)


![{\displaystyle {\begin{aligned}D{\bar {x}}_{0}(t)&=f(t)+\int _{t_{0}}^{t}{{\frac {\partial }{\partial t}}G(t,t')f(t')dt'}\\&=f(t)+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[Dx_{2}(t)]-[Dx_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\quad ...(52)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/08e9c1be2966d30534215a97fa6f08a4e7cb35c2)
![{\displaystyle {\begin{aligned}D^{2}{\bar {x}}_{0}(t)&=Df(t)+\\&+f(t)+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[D^{2}x_{2}(t)]-[D^{2}x_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\quad ...(53)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/3f23224de38812d42d45d4b60d6fbce6152d844d)
![{\displaystyle {\begin{aligned}L{\bar {x}}_{0}(t)&=Df(t)+f(t)\\&+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[Lx_{2}(t)]-[Lx_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&=Df(t)+f(t)\quad ...(53)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/01426f4ae273a8d82baba3a20868fb9a948d4d35)





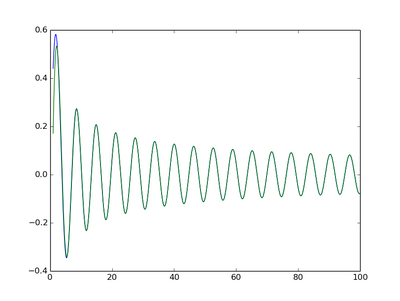

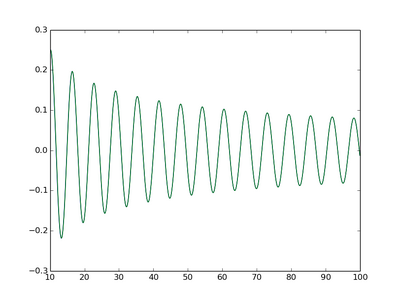











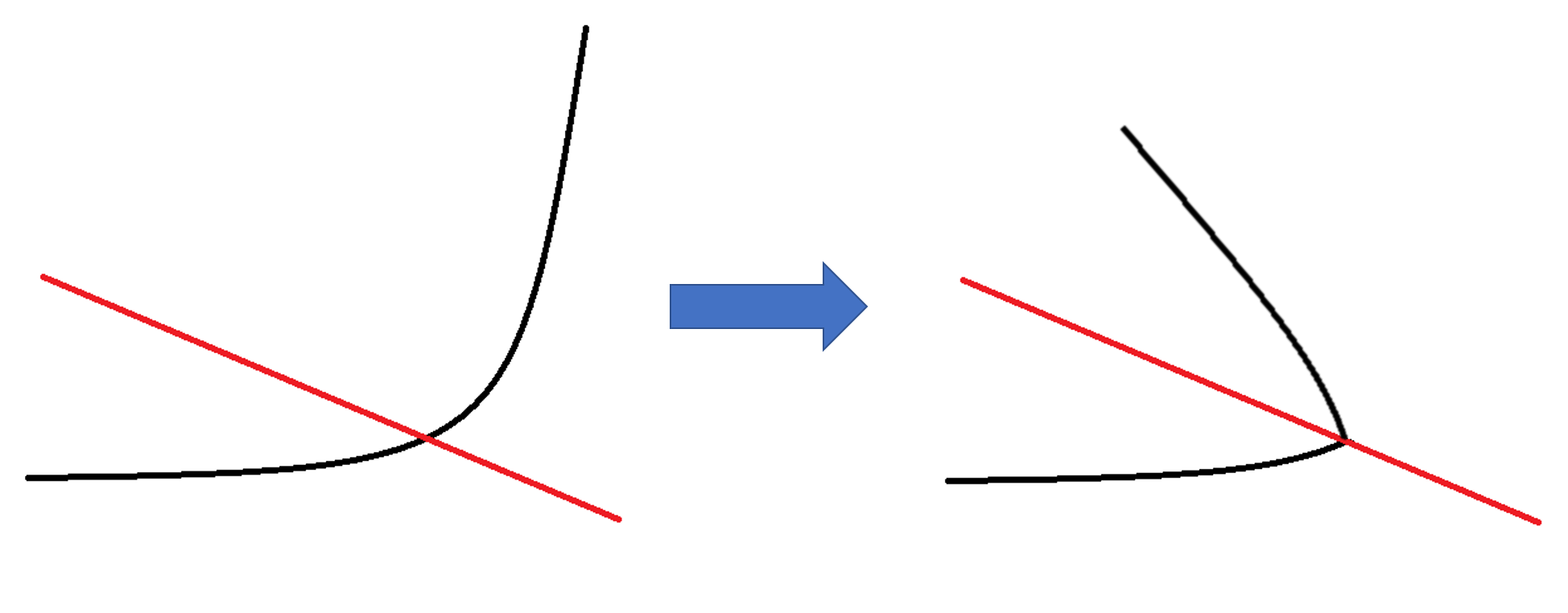











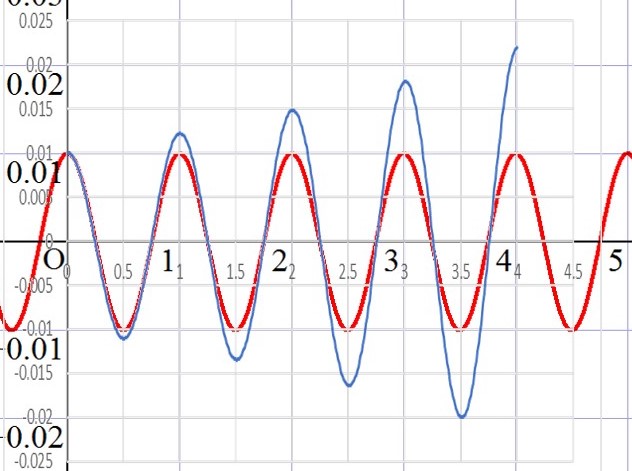













![{\displaystyle m\left[{\ddot {\xi }}-\xi \Omega ^{2}-2{\dot {\eta }}\Omega \sin \Omega t\right]=f_{x}\cos \Omega t+f_{y}\sin \Omega t}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/98f4f32f07e00a4bf05fc63e59fda5d4561489e7)
![{\displaystyle m\left[{\ddot {\eta }}-\eta \Omega ^{2}+2{\dot {\xi }}\Omega \cos \Omega t\right]=-f_{x}\sin \Omega t+f_{y}\cos \Omega t}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/64cdba60aab2be503b6dbf113f7ddee28077ade7)

![{\displaystyle m\left[{\ddot {\xi }}-\xi \Omega ^{2}-2{\dot {\eta }}\Omega \sin \Omega t\right]=f_{\xi }}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/1234ccf9129f5f4d0cc48f1bafa80d7486867b13)
![{\displaystyle m\left[{\ddot {\eta }}-\eta \Omega ^{2}+2{\dot {\xi }}\Omega \cos \Omega t\right]=f_{\eta }}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/202f623e7859430a54915133716a60fc4055c3cc)
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
.jpg){kind=link}
.jpg){kind=link}
.jpg){kind=link}
.jpg){kind=link}
.jpg){kind=link}
.jpg){kind=link}
.jpg){kind=link}
.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


{kind=link}


{kind=link}


{kind=link}


{kind=link}


{kind=link}


{kind=link}


{kind=link}